

Adaptive under-actuated non-cooperative target space capturing mechanism
A non-cooperative target, space capture technology, applied in the field of adaptive under-actuated non-cooperative target space capture mechanism, can solve the problems of poor target self-adaptability, technical difficulty, and capture failure, and achieves simple structure and application. Wide-ranging, fast-capturing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with drawings and embodiments.
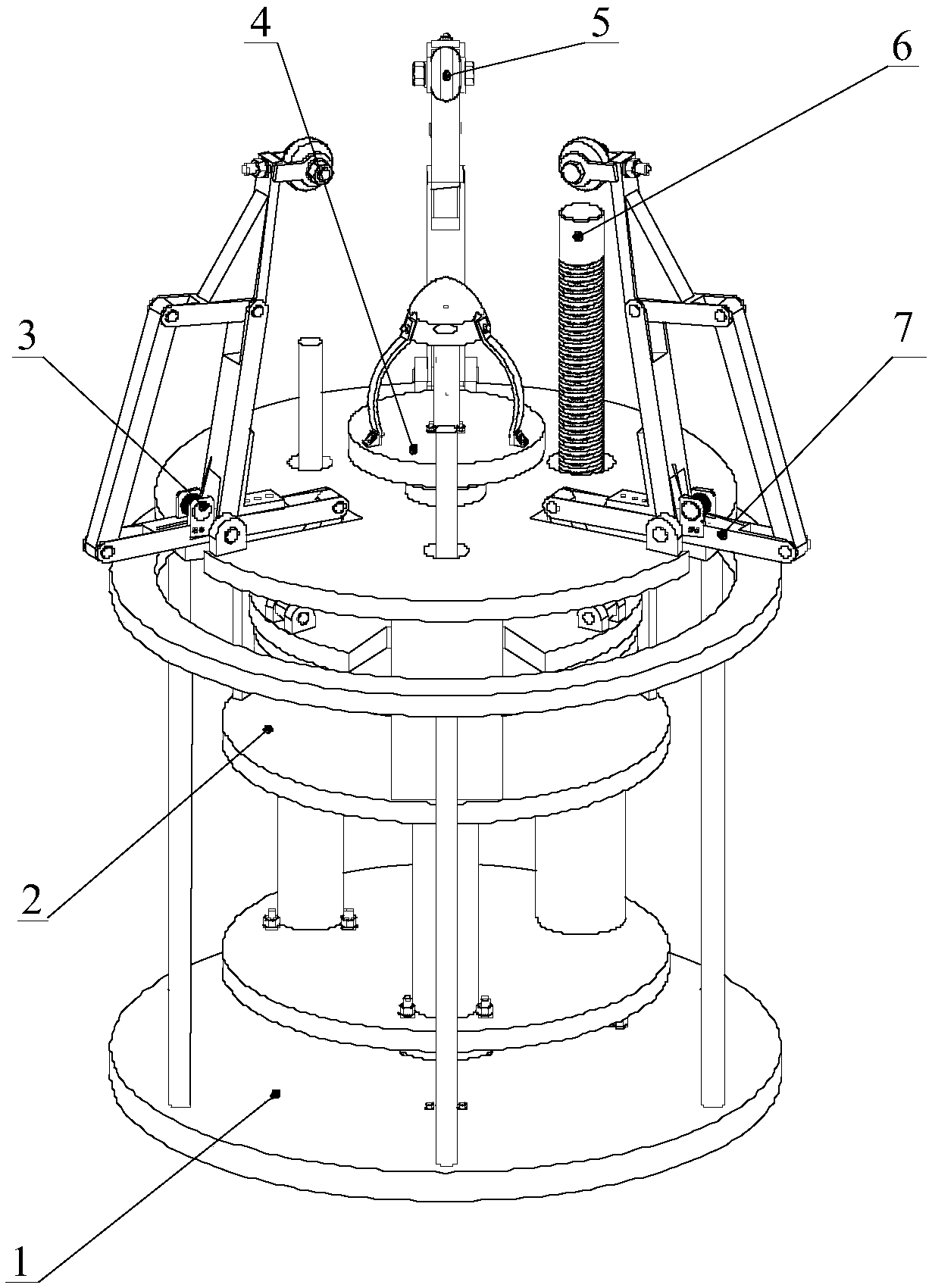
[0028] like figure 1 As shown, an adaptive underactuated non-cooperative target space capture mechanism includes a mechanism carrying cylinder 1, a stretching mechanism 2, an underactuated manipulator 3, a buffer guiding platform 4, a manipulator end effector 5, a driving motor and a manipulator The folding mechanism 7; the mechanism carrying cylinder 1 is used to carry the stretching mechanism 2, which is shaped like a birdcage, including a pillar, a base and a ring, and the base and the ring are fixed by six pillars uniformly distributed along the circumferential direction; the driving motor is arranged on the satellite of the body , to drive the stretching mechanism 2; the three five-rod mechanical arm bodies of the mechanical arm folding mechanism 7 are evenly distributed on the outer end of the stretching mechanism 2 along the circumferential direction, and are syn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More