

Kneebend semi-passive walking robot and control method
A walking robot, semi-passive technology, applied in the field of robots, can solve problems such as inability to work, and achieve the effect of overcoming terrain restrictions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0035] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0036] Embodiments of the present invention provide a knee-bendable semi-passive walking robot and a control method. Passive robot refers to only relying on gravity to passively rotate the joints of the robot, so as to realize the walking of the robot. The semi-passive robot refers to the rotation between some joints of the robot by providing mechanical energy, and the rotation of the rest of the joints is passively realized by gravity.
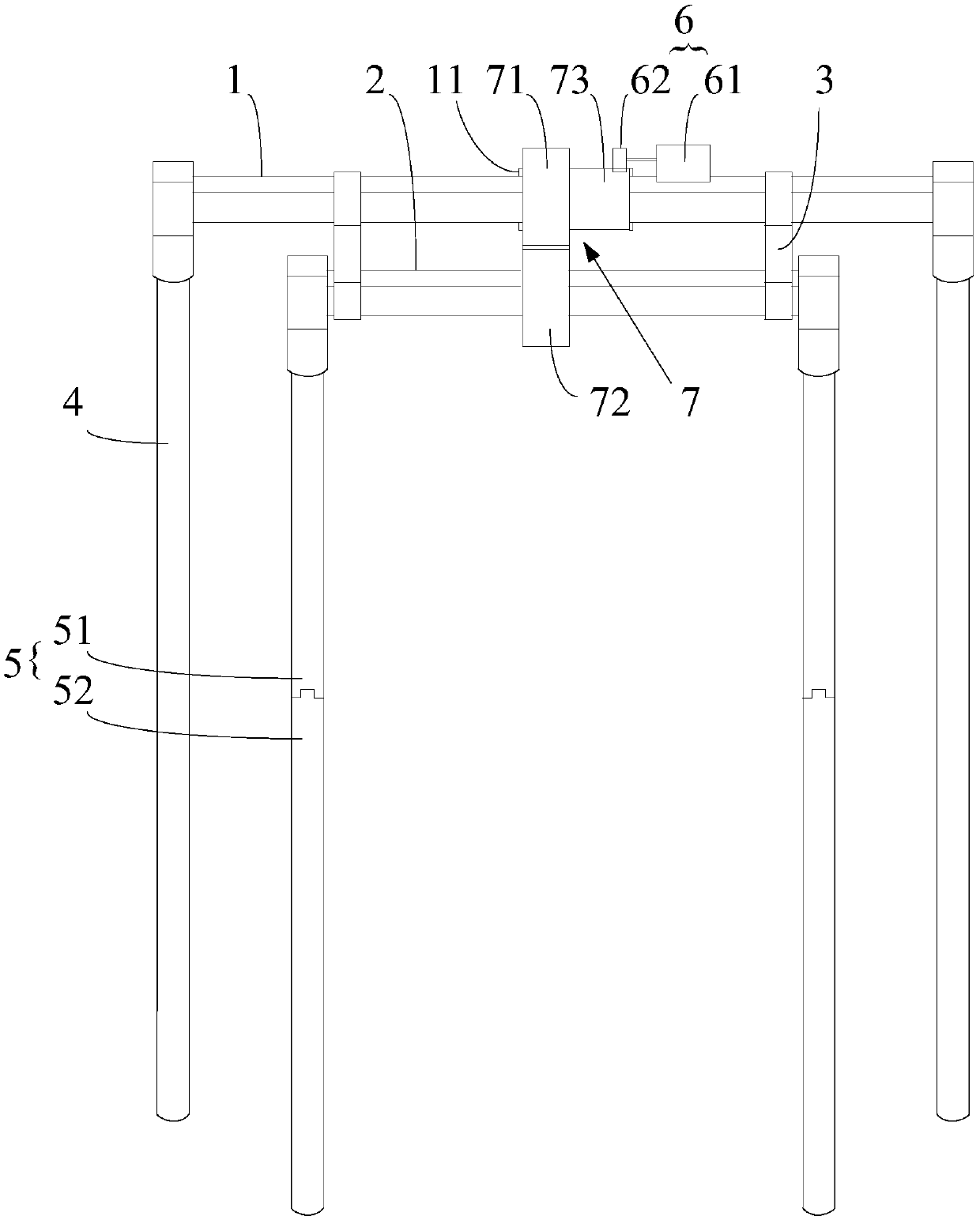
[0037] figure 1 is a schematic structural diagram of a semi-passive walking robot provided by an embodiment of the present invention, combined with figure 1 , in this embodiment, the semi-passive walking robot includes: an outer leg link 1, an inner leg link 2, a limit rod 3, two outer legs 4, two i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More