Heterogeneous modular robot self-reconfiguration planning method based on enhanced learning algorithm
A technology of reinforcement learning and robotics, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve problems such as low efficiency and many times of module movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
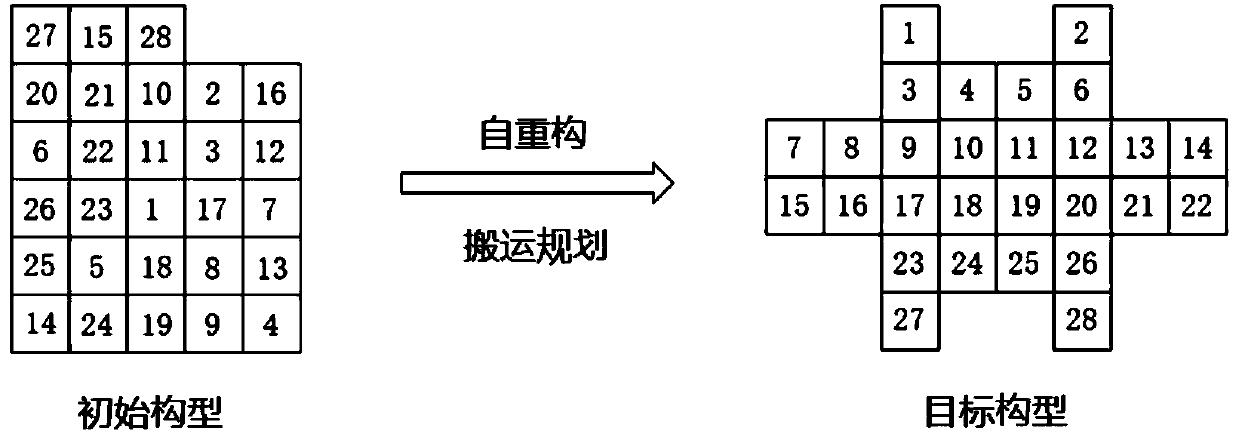
[0046] The purpose of the present invention is aimed at the modular robot composed of n (n>100) modules, using the reinforcement learning algorithm to realize the disassembly sequence of the self-reconfigurable modular robot from any initial configuration to the specified target configuration, Make the number of assembly as small as possible and improve the efficiency of self-reconfiguration.
[0047] The object of the algorithm application is mainly a robot composed of modules with the same specifications, and each module has at least two surfaces that can be used for docking.
[0048] In order to achieve the above object, the technical solution adopted in the present invention comprises the following steps:
[0049] Step 1: Given an initial modular robot configuration and a target configuration with N modules, convert the two configurations into N×N×N matrices...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com