

Soft crawling robot driven by super-spiral polymer actuator
A crawling robot and polymer technology, applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of poor control performance, poor environmental adaptability, high processing cost, etc., and achieve the effects of poor control performance, simple processing, and low processing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the technical problems, technical solutions and beneficial effects solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
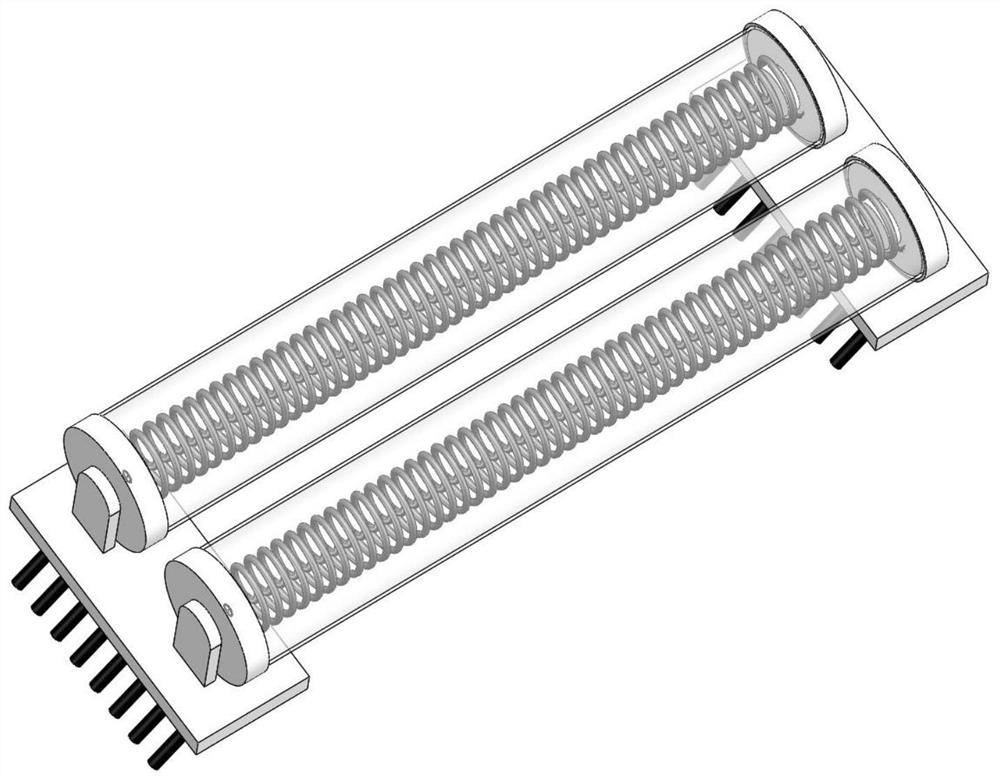
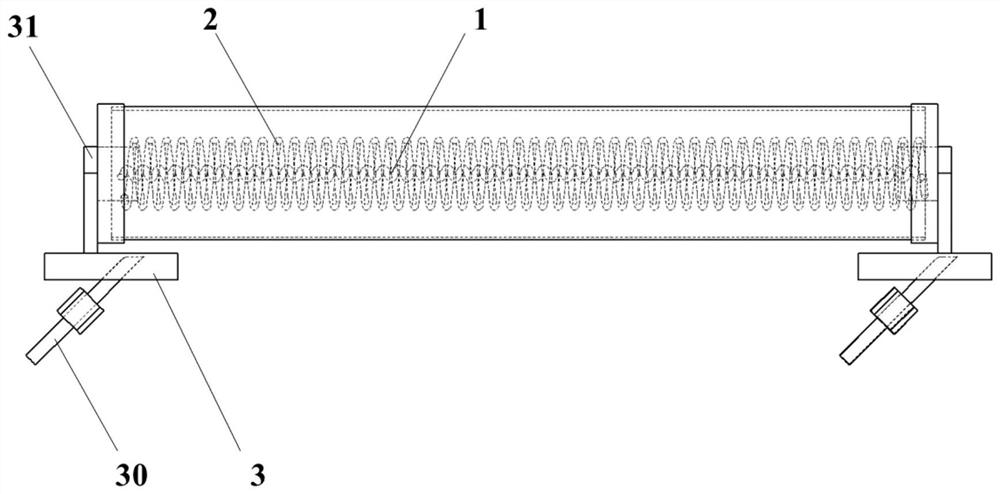
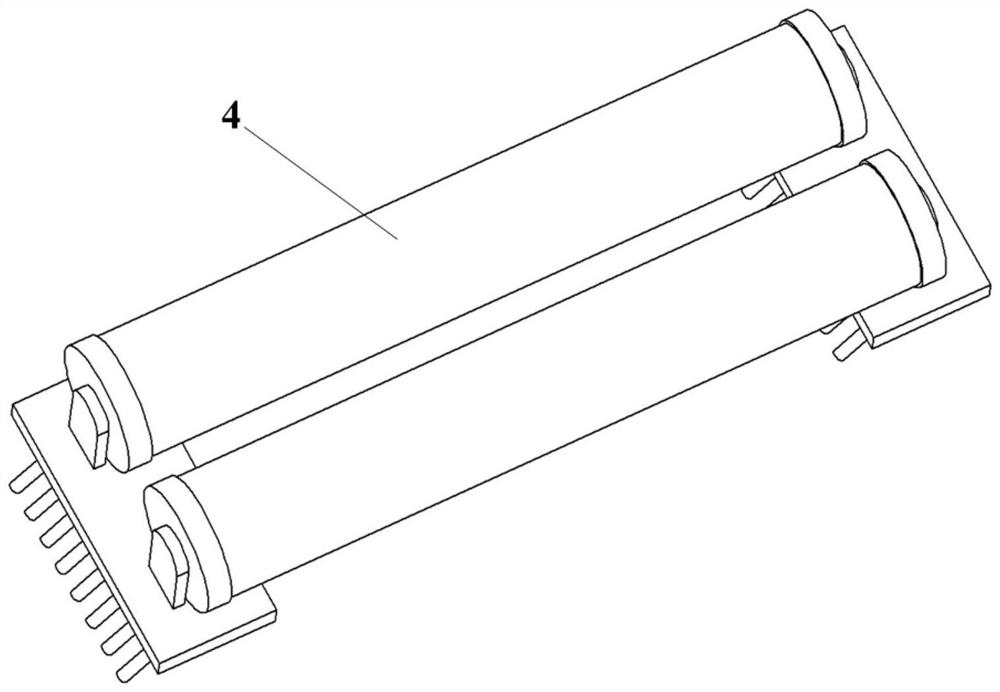
[0027] refer to Figure 1 to Figure 3 , the present invention provides a soft crawling robot driven by a superhelical polymer actuator. It mainly includes a superhelical polymer actuator 1 , a return spring 2 , a foot structure 3 and a skin structure 4 . The foot structure 3 mainly includes a friction plate 30 and a connecting structure 31 . In the middle of the cavity of the skin structure 4, the superhelical polymer actuator 1 and the return spring 2 are placed in parallel with the robot's forward direction as the axis, and the skin structure 4 is made of a polymer e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More