

Design method of guideline and left-turn stop line at left-turn intersection
A technology for left-turn intersections and design methods, which is applied to roads, roads, buildings, etc., and can solve problems such as reducing the safety of intersections, not considering the alignment requirements of guide lines at left-turn intersections, and conflicts between left-turning vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0025] Specific implementation mode one: the specific process of a kind of left-turn intersection guiding line and left-turn stop line design method in this embodiment is:
[0026] Step 1. Determine the coordinate system and parameters of the intersection;
[0027] Step 2, determining the constraint conditions of the guide line at the left-turn intersection;
[0028] Step 3. Based on step 2, determine whether the guidance line of the left-turn intersection is obtained. If the guidance line of the left-turn intersection is obtained, draw the guidance line of the left-turn intersection on the basis of the position of the existing left-turn stop line; if the guidance line of the left-turn intersection cannot be obtained line, go to step 4;
[0029] Step 4: Make the guide line at the left-turn intersection follow the inner lane, change the position of the stop line, and regain the guide line at the left-turn intersection.
specific Embodiment approach 2
[0030] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the intersection coordinate system and parameters are determined in the step one; the specific process is:
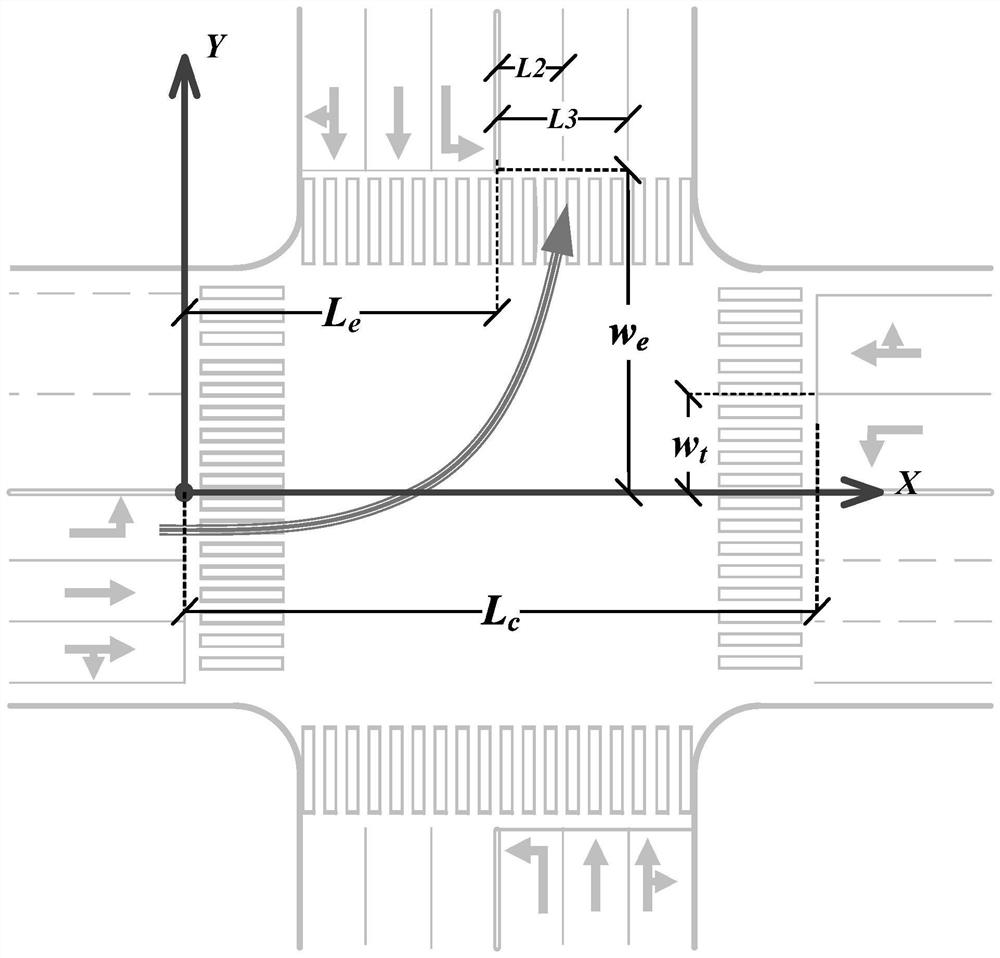
[0031] In order to facilitate the quantitative research, the Cartesian coordinate system of the intersection is established first. Such as figure 1 As shown, take the straight line where the entrance lane of left-turning vehicles and the opposite roadway is located as the x-axis, and take the straight line where the parking line of the left-turning lane of the entrance road is as the y-axis to establish a Cartesian coordinate system for the intersection, and the positive direction of the x-axis points to the The direction of the exit lane directly in front of the entrance lane of the left-turning vehicle, the positive direction of the y-axis points to the direction of the exit lane that the left-turning vehicle is about to enter;
[0032] The parameter is: w t 、w...
specific Embodiment approach 3
[0043] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is that the constraint condition of the guidance line of the left-turn intersection is determined in the step two; the specific process is:
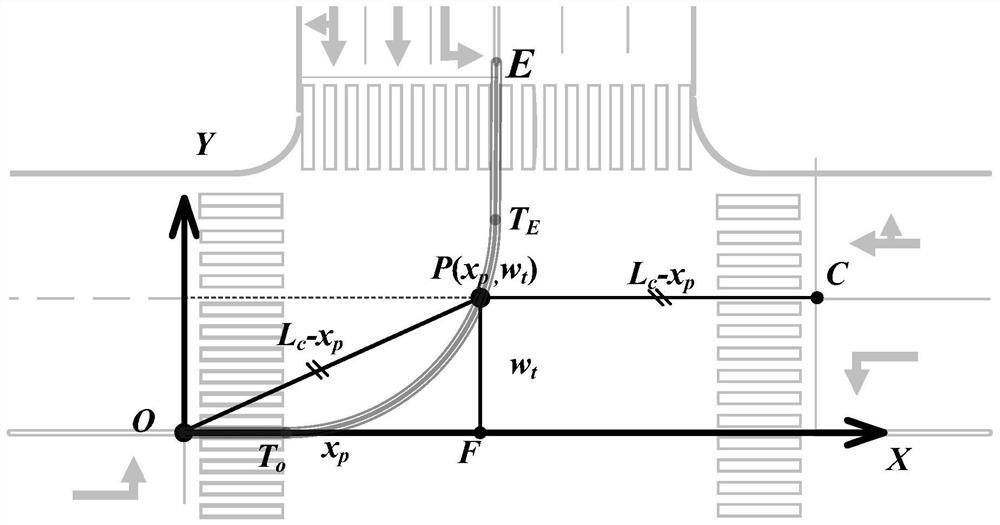
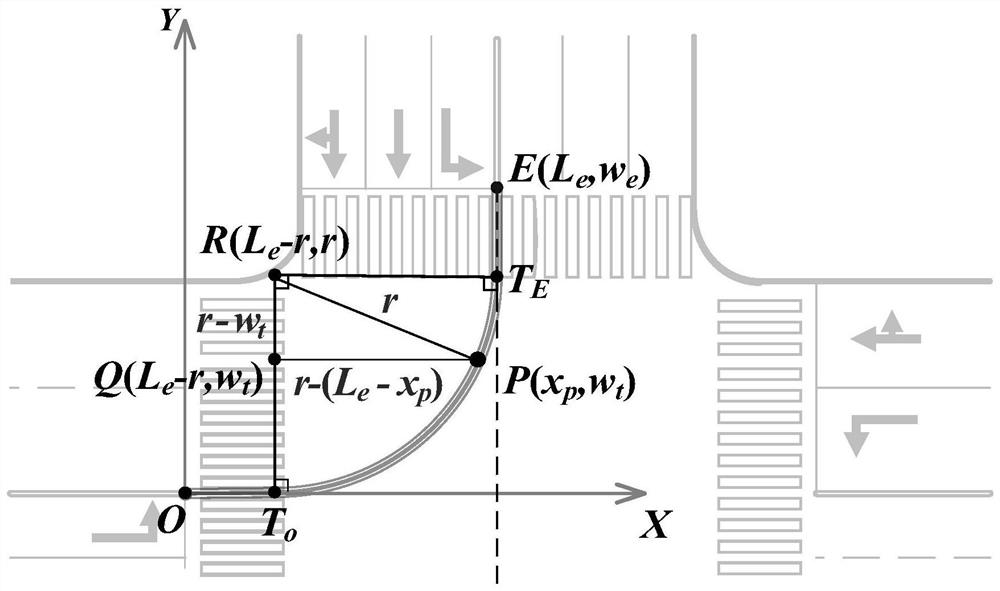
[0044] According to the trajectory of the left-turn traffic flow in the intersection, the design of the guideline at the left-turn intersection should focus on the positions of three constraint points: the starting point of the turn caused by the location of the entrance road, the end point of the turn caused by the location of the exit road, Conflict limit points affected by through traffic flow. The coordinate values of each constraint point are discussed separately below.
[0045] (1) Determine the coordinates of the steering starting point
[0046] The turning start point is the place where the left-turning vehicle starts to turn at the intersection approach. Considering that the driver is driving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More