Overall homeward voyage path planning method and planning system, storage medium and unmanned aerial vehicle
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A return-to-home path and planning system technology, which is used in control/adjustment systems, three-dimensional position/channel control, vehicle position/route/altitude control, etc. problems, to achieve high real-time and security, high practical significance, and optimal strategies
Active Publication Date: 2021-04-13
一飞智控(天津)科技有限公司
View PDF6 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, at present, there is no solution to the path planning of the overall return state of the UAV formation, so that the formation can achieve a safe and effective overall return action, and the return path planning cannot be realized.
[0003] Through the above analysis, the existing problems and defects of the existing technology are: currently there is no solution to the path planning of the UAV formation in the overall return state, so that the formation can achieve a safe and effective overall return action, and the return path planning cannot be realized
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
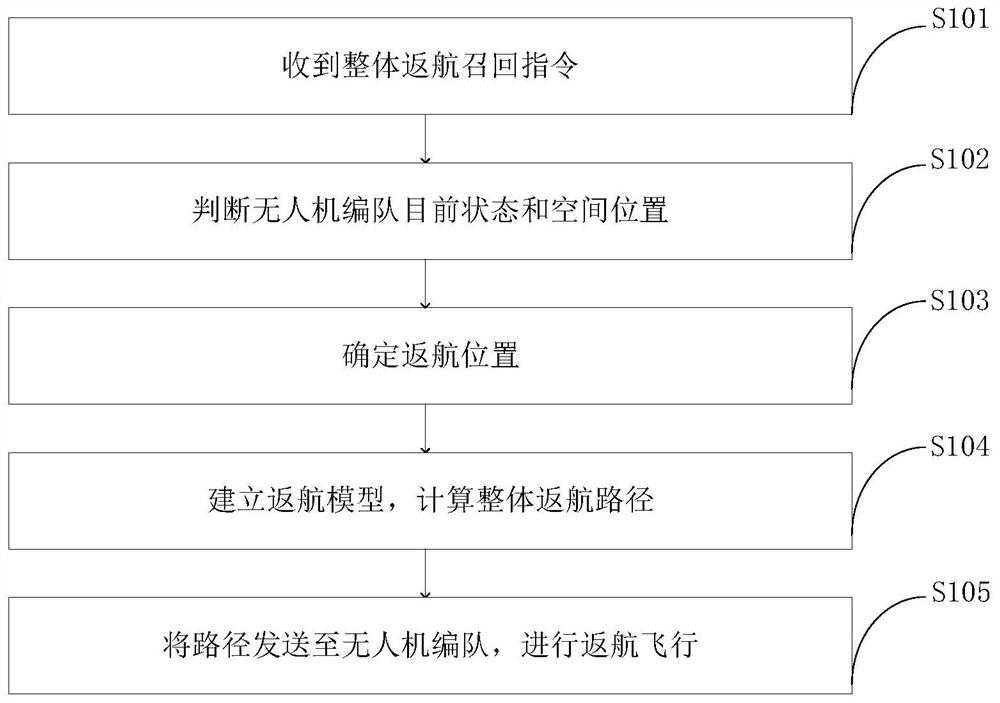
[0113]An overall return path planning method of drone aquators, including the following specific steps:
[0114]Step 1: Receive the overall return recall directive;
[0115]Step 2: Judging the current state and spatial position of the drone aquame;
[0116]Step 3: Determine the return location;
[0117]Step 4: Calculate the overall return path;
[0118]Step 5: Send the path to the drone block and return flight.
Embodiment 2
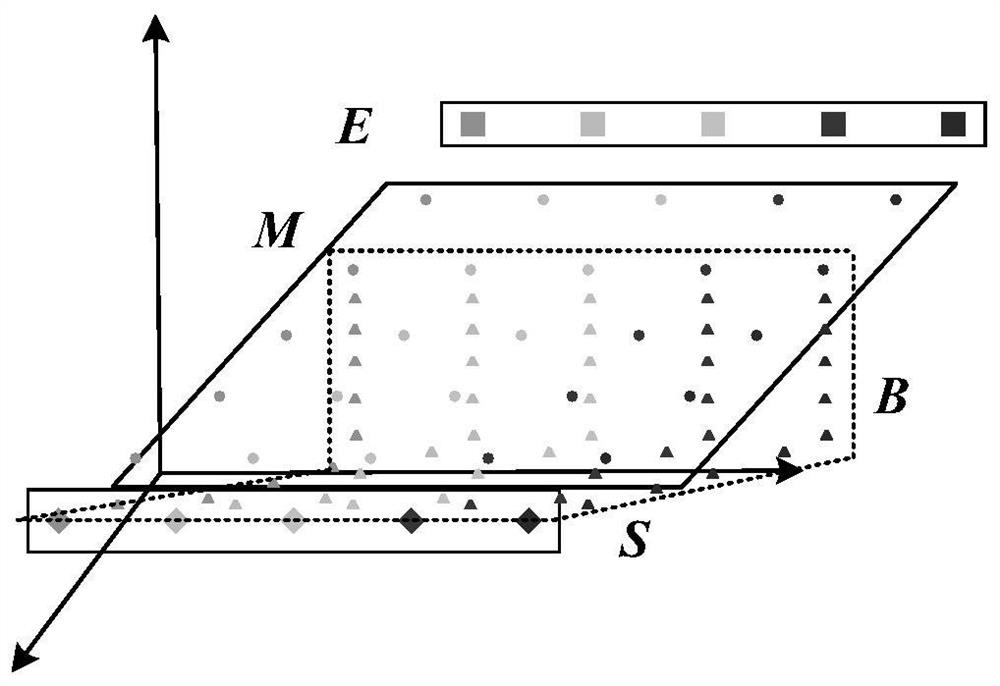
[0120]The establishment of the return model includes:
[0121]Create a spatial right coordinate system W. Three axes of WWYW,zWPoint to east, south and sky; the offset position in the space is expressed as (x, y, z), and the unit is m.
[0122]Assuming a total of N rack drones, the initial formation position of the drone block is expressed as:
[0123]S = [s1, S2, S3, ..., sn];
[0124]The end point of the drone format is expressed as:
[0125]E = [e1, E2, E3, ..., en];
[0126]The unmanned team is expressed as the formation of a certain time t
[0127]Mt= [Mt1, Mt2, Mt3, ..., MTN ];
[0128]Where Sn, En, MTN All are the location points in W.
[0129]As a result, the goal of the drone packet is: the formation is changed from S to E.
[0130]Assuming a total of P paths is planned in the entire formal change. The path of the drones in the process can be expressed as:
[0131]
[0132]When the drone packet needs to return overall, it is necessary to plan all drones from the current state. If the time t starts to plan a d...
Embodiment 3
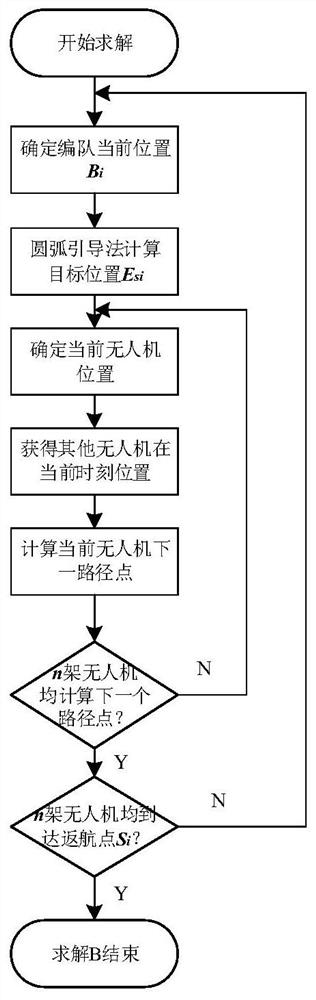
[0135]The path calculation method is:
[0136](1) Determine the current position of the drone packet Bi;
[0137](2) Calculate the current drone arc boot target point position ESi;
[0138](3) Calculate the next path;
[0139](4) Repeat (2-3) until the N drones in the formation completed the calculation of the next path;
[0140](5) Repeat (1-4) until the formation drone arrives at the return position Bq= S.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention belongs to the technical field of unmanned aerial vehicle control, and discloses an overall homeward voyage path planning method and planning system, a storage medium and an unmanned aerial vehicle. The method comprises: receiving an overall homeward recall instruction; judging the current state and spatial position of the unmanned aerial vehicle formation; determining a homeward voyage position; establishing a homeward voyage model, and calculating an overall homeward voyage path; and sending the path to the unmanned aerial vehicle formation for return flight. The unmanned aerial vehicle formation overall return path planning method provided by the invention can realize unmanned aerial vehicle formation overall return path planning in a dynamic state, and has the technical characteristics of safety, reliability, collision prevention and optimal strategy. High practical significance is realized. According to the invention, the overall dynamic return route planning of the unmanned aerial vehicle formation can be realized, and the method has high real-time performance and safety. According to the method, optimal dynamic return route planning can be carried out, the planning result meets the performance requirements of the unmanned aerial vehicle, and the practicability is high.
Description
Technical field[0001]The present invention belongs to the field of drone control technology, and more particularly to a holistic return path planning method, planning system, storage medium, and drone.Background technique[0002]Currently, a number of drones are used to form a specific formation in the air, and the payload is used to complete a specific function. In the implementation task, the drone formation may occur due to changes in the task, and the overall return will be required to adjust the formation of the formation immediately, and return to the take-off base at the fastest speed. When the drone packet is recalled, the flight state and flight performance of the drone individual in each formation are normal, so the overall return to the formation system is real-time task injection. However, there is currently no resolution of path planning in the overall return state of the drone formation, in order to formulate a safe and effective overall return operation, and cannot achi...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More