

Underwater vehicle bionic geomagnetic navigation method based on deep reinforcement learning
An underwater vehicle and reinforcement learning technology, applied in ground navigation, navigation through speed/acceleration measurement, navigation, etc., can solve problems such as difficulties in obtaining geomagnetic maps, inability to learn navigation, and lack of learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
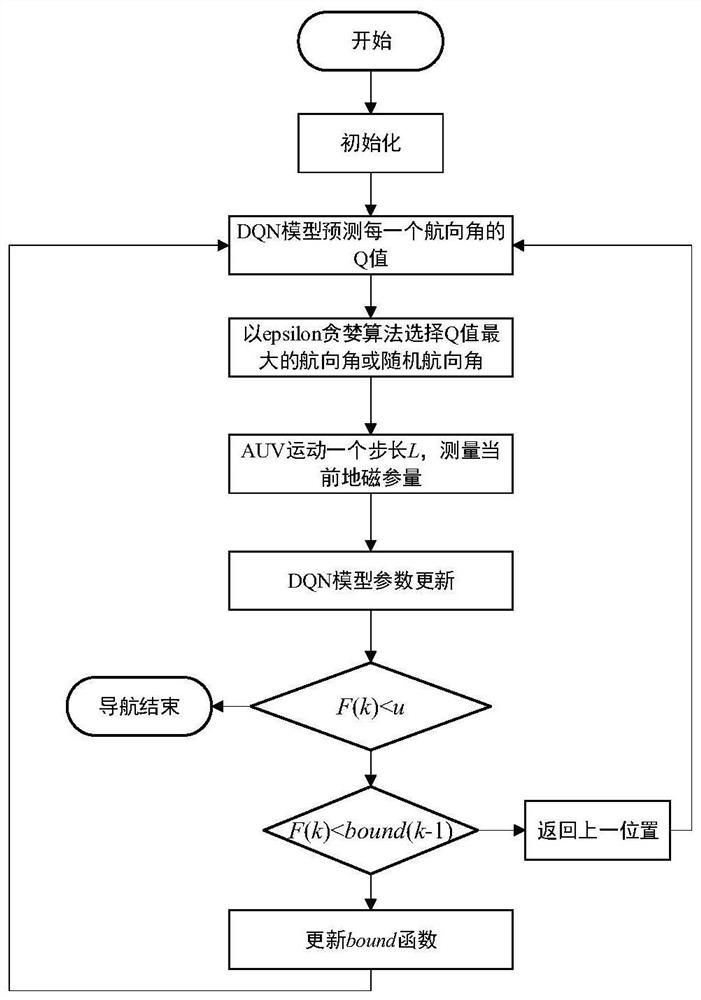
[0036] The purpose of the present invention is that the traditional evolutionary search algorithm has greater randomness in the selection of the heading angle, and when the AUV is performing tasks such as patrolling and transporting between two places, it cannot gain experience and obtain a better strategy. To solve this problem, a geomagnetic bionic navigation algorithm based on deep reinforcement learning is proposed, which uses deep reinforcement learning to obtain the magnetic trend law, predicts the heading angle of the AUV, and uses the constraints of the boundary function to make the AUV reach the target position faster. When the AUV needs to go back and forth between the two places multiple times, a better and shorter navigation path can be obtained by updating the strategy.
[0037] First, establish the AUV kinematics model.
[0038] Considering an autonomous underwater vehicle (AUV) as a particle in a two-dimensional plane, its equation of motion is:
[0039]
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More