

Automatic parking trajectory planning method based on deep enhanced learning
A technology of automatic parking and enhanced learning, which is applied to simulators of space navigation conditions, space navigation equipment, instruments, etc., can solve the problems of vehicle position control error accumulation, unsatisfactory accuracy and reliability, and difficulty in precise control , to improve the accuracy and reliability of the
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
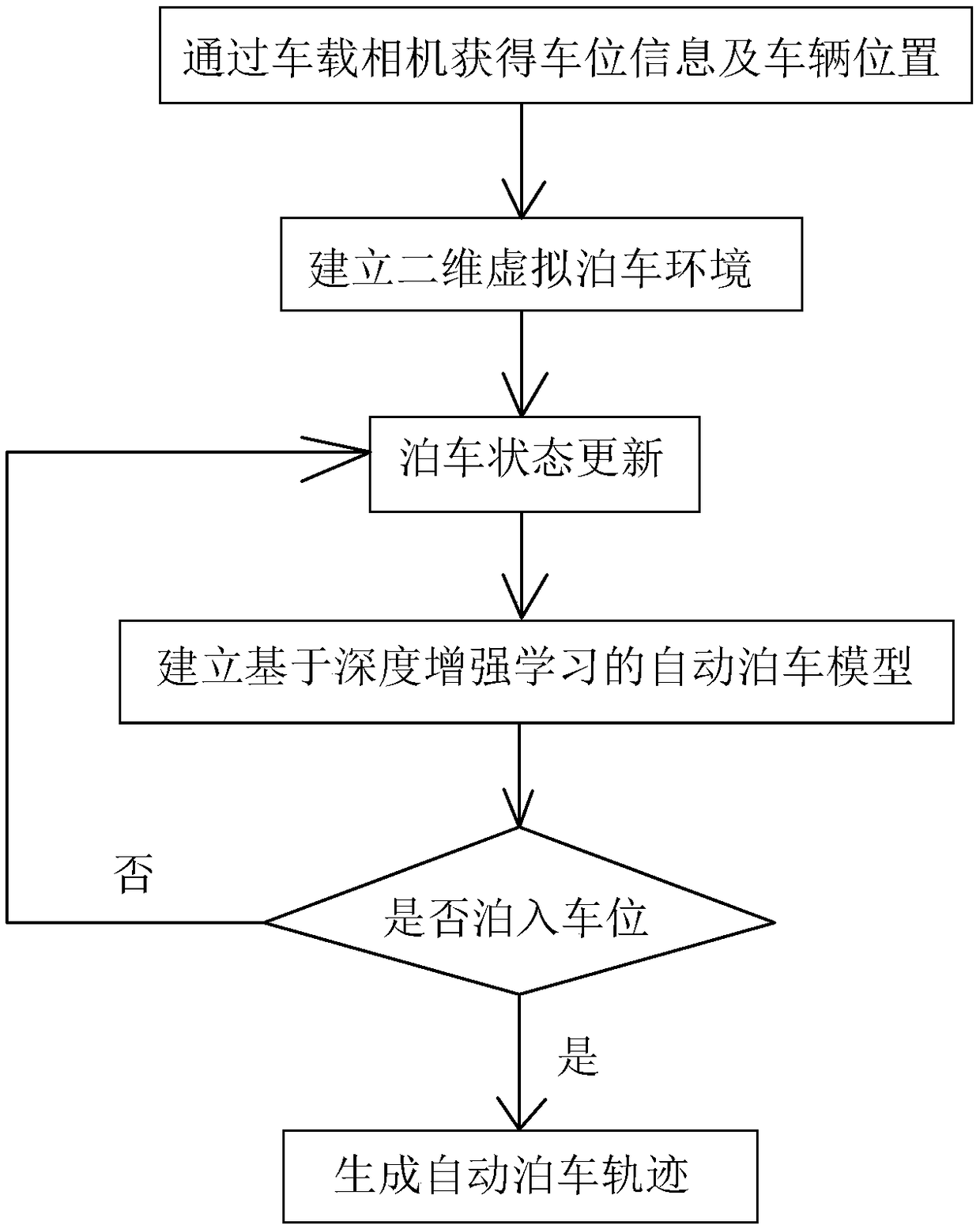
[0024] Embodiment: A kind of automatic parking trajectory planning method based on deep reinforcement learning of this embodiment, such as image 3 shown, including the following steps:
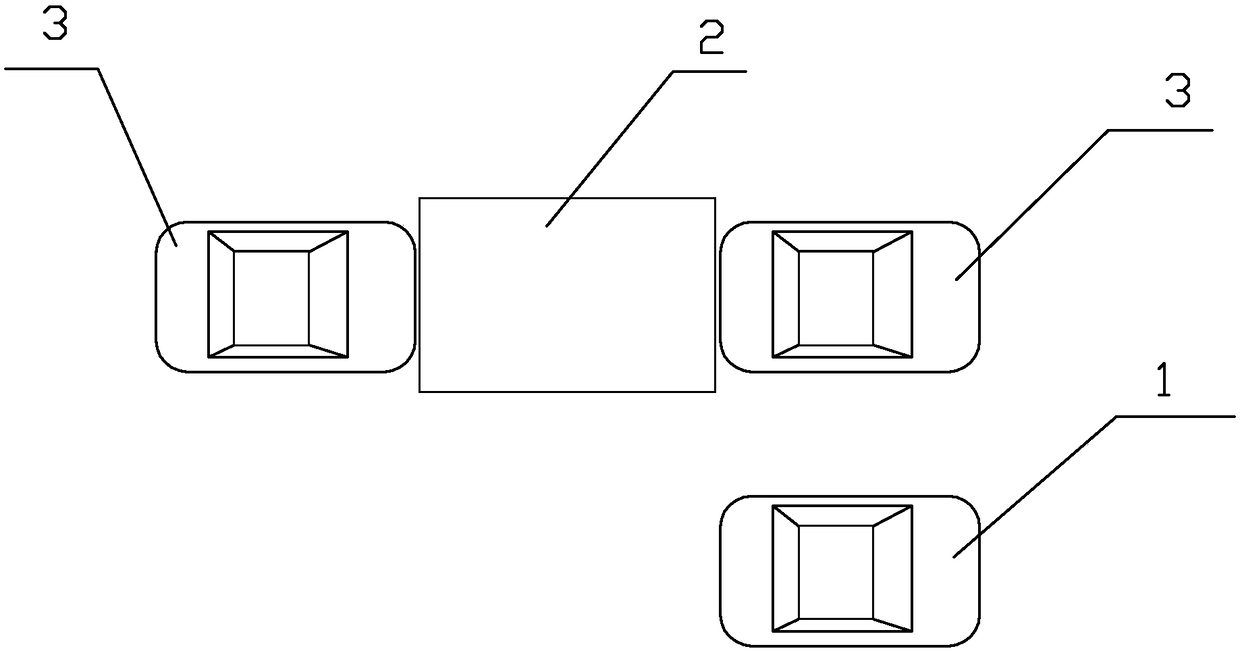
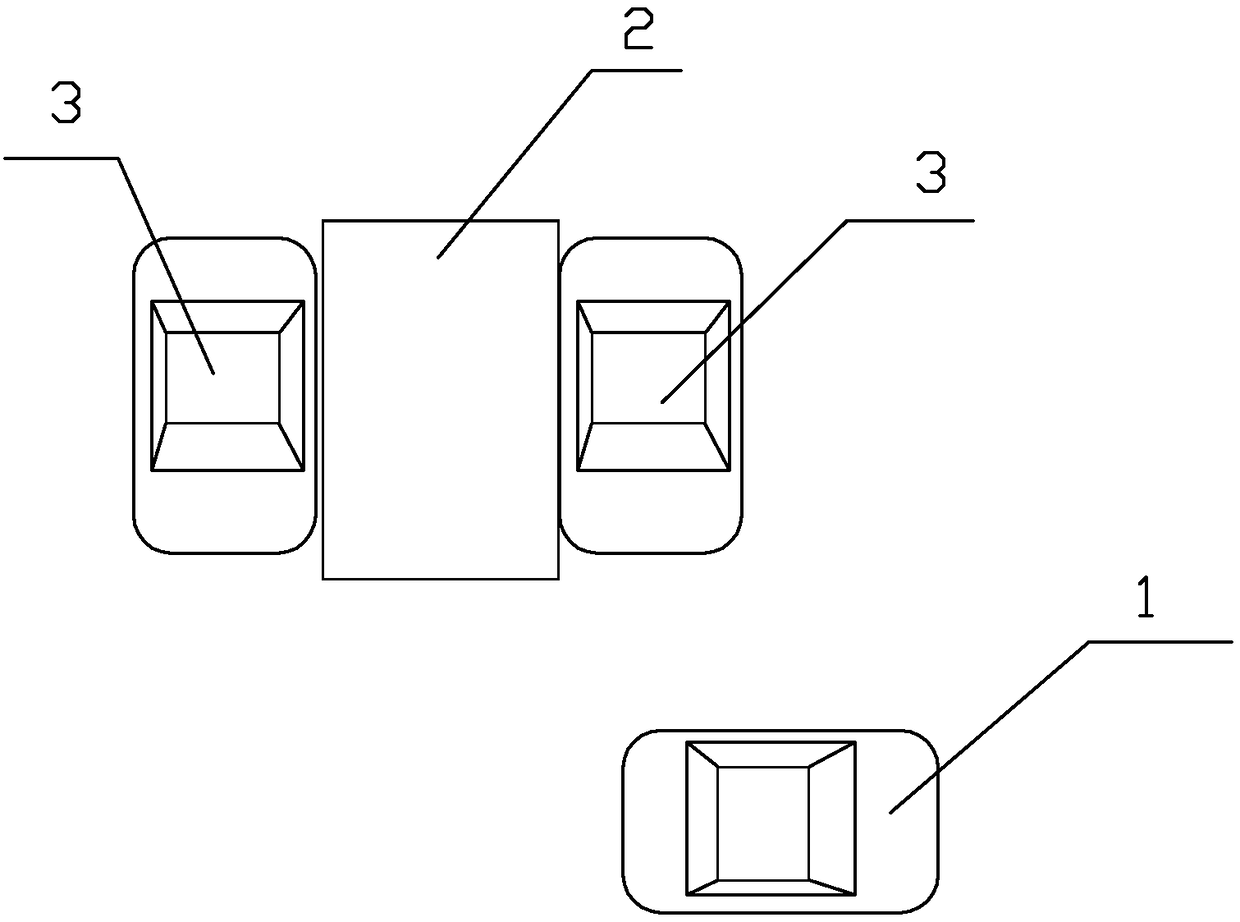
[0025] ① Obtain the parking space information and the relative position of the vehicle and the parking space through the on-board camera, use different colors to represent obstacles and vehicles in the obtained image, and mark a virtual parking space that is small enough and narrow enough to be used as a parking training space (side parking When driving, the length of the virtual parking space is 1.2 times the length of the car; when parking in reverse, the width of the virtual parking space is 1.2 times the width of the car), to establish a two-dimensional virtual parking environment;
[0026] ②In the case of low speed, that is, the vehicle speed is below 10km / h, simulate the vehicle parking movement, set the steering wheel angle range between -40° and 40°, divide it evenly, and take a corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More