

Modular high-expansion-and-contraction-rate robot based on paper folding mechanism
A robotic and modular technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited robot application range, complex structure, high failure rate, etc., to achieve good flexibility and adaptability, firm structure, and easy operation flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] It should be noted that, for the convenience of describing the structural features of the present invention and simplifying the description, in the description of the present invention, the terms "upper", "lower", "top", "bottom", "one side", "another side" The orientation or positional relationship indicated by , "left", "right", etc. is based on the orientation or positional relationship shown in the drawings, and does not mean that the structure must have a specific orientation, be constructed and operated in a specific orientation.
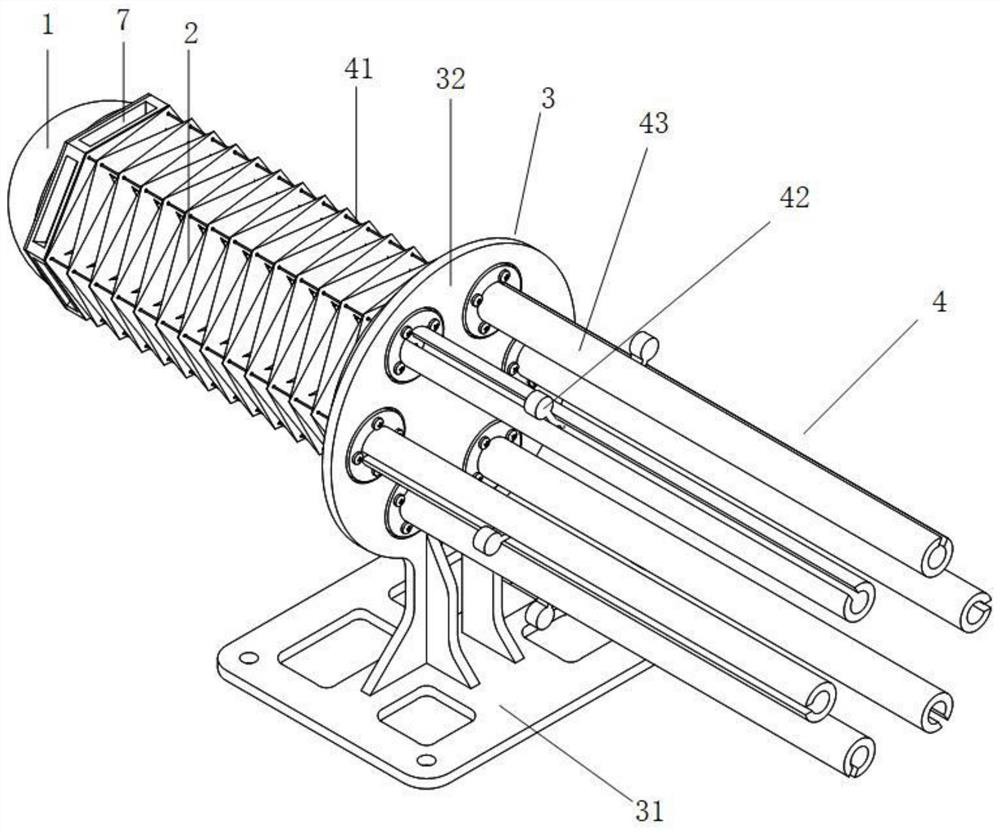
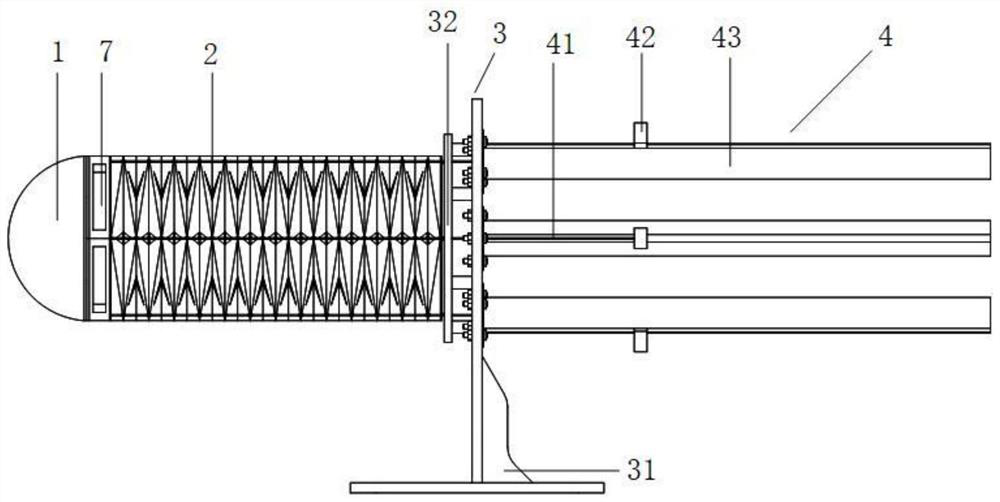
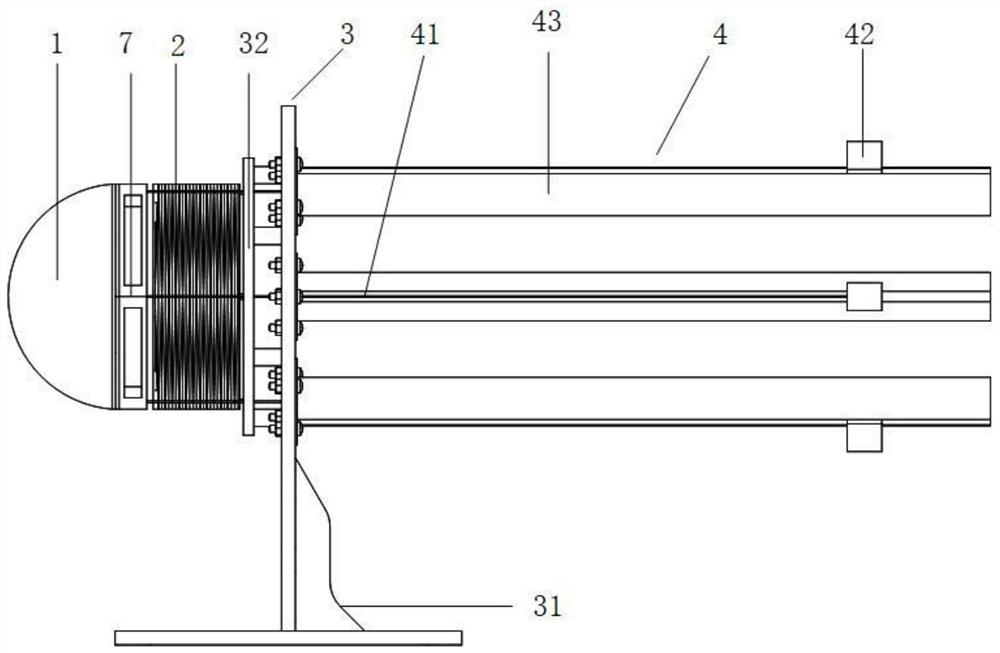
[0038] Such as Figure 1 ~ Figure 3 As shown, the origami mechanism-based modular high-stretch-rate robot disclosed in the present invention includes a robot end effector 1 , an origami module 2 , a base 3 and a drive module 4 . The origami module 2 and the driving module 4 are installed on both sides of the base 3 respectively, the robot end effector 1 is installed at the end of the origami module 2 through the connecting module 7, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More