

Nuclear-related operator path planning method and system based on BIM (Building Information Modeling) technology
A technology for operator and path planning, applied in control/adjustment system, two-dimensional position/channel control, vehicle position/route/altitude control, etc. Dose size, staff and environmental safety and other issues, to achieve the effect of reducing personnel exposure dose, improving design efficiency, and protecting safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
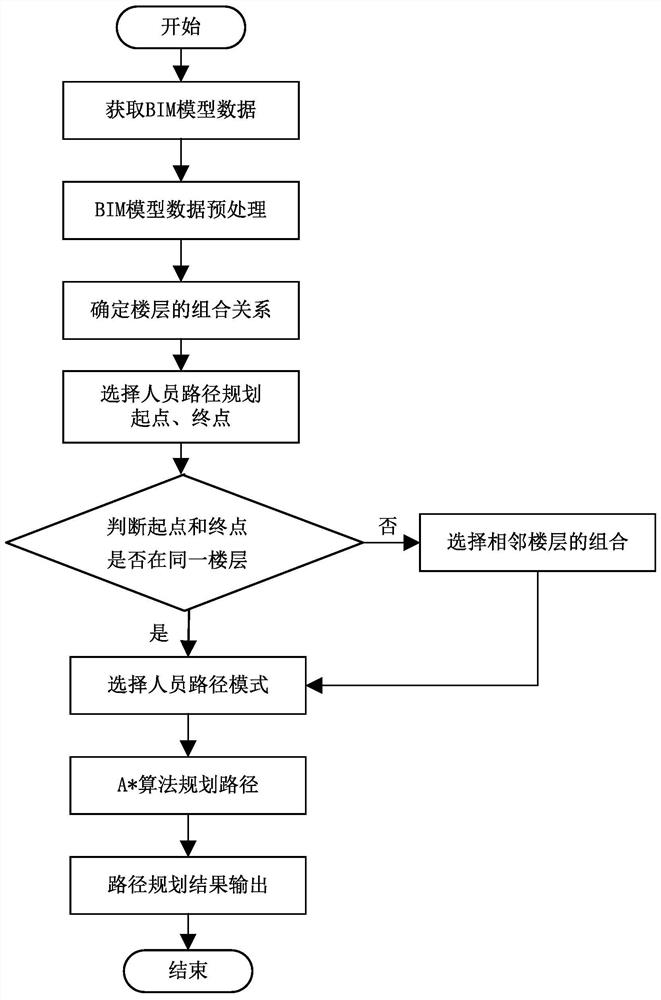
[0079] Such as Figure 1 to Figure 6 As shown, according to an embodiment of the present invention, there is provided a BIM technology-based path planning method for nuclear operators. The path planning method uses Catia to build a three-dimensional model, C++ language programming, and A* algorithm for path planning, such as figure 1 As shown, the specific implementation process includes: obtaining BIM model data; BIM model data preprocessing; determining the arrangement and combination of floors; selecting the starting point and end point of personnel path planning; judging whether the starting point and end point are on the same floor; *Algorithm planning path; path planning result output.
[0080] A method for path planning of nuclear operators based on BIM technology, the method comprising:
[0081] S1: Obtain the relevant parameter data of the nuclear plant from the BIM 3D scene model, specifically, extract the BIM 3D scene data of the nuclear plant (that is, the graphic...
Embodiment 2
[0126] Such as Figure 1 to Figure 7 As shown, the difference between this embodiment and Embodiment 1 is that this embodiment provides a BIM-based nuclear operator path planning system, and the system supports the BIM-based nuclear operation described in Embodiment 1. Personnel path planning methods, such as Figure 7 As shown, the system includes:
[0127] The acquisition unit is used to acquire relevant parameter data of the nuclear power plant from the BIM three-dimensional scene model;
[0128] The preprocessing unit is used to perform rasterized preprocessing on the obtained relevant parameter data of the nuclear power plant to obtain the structure parameter data;
[0129] Determining the combination relationship unit of the floor, used to determine the combination relationship of the floors of the nuclear power plant according to the preprocessed structure parameter data;
[0130] Select the starting and ending unit, which is used to select the starting and ending po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More