

Robot mixing time control method and system with input hysteresis and medium
A robot system and hybrid time technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as system performance impact, limited communication resources, and increased system communication burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
[0076] Below in conjunction with accompanying drawing, the implementation principle of the method of the present invention is described in detail:
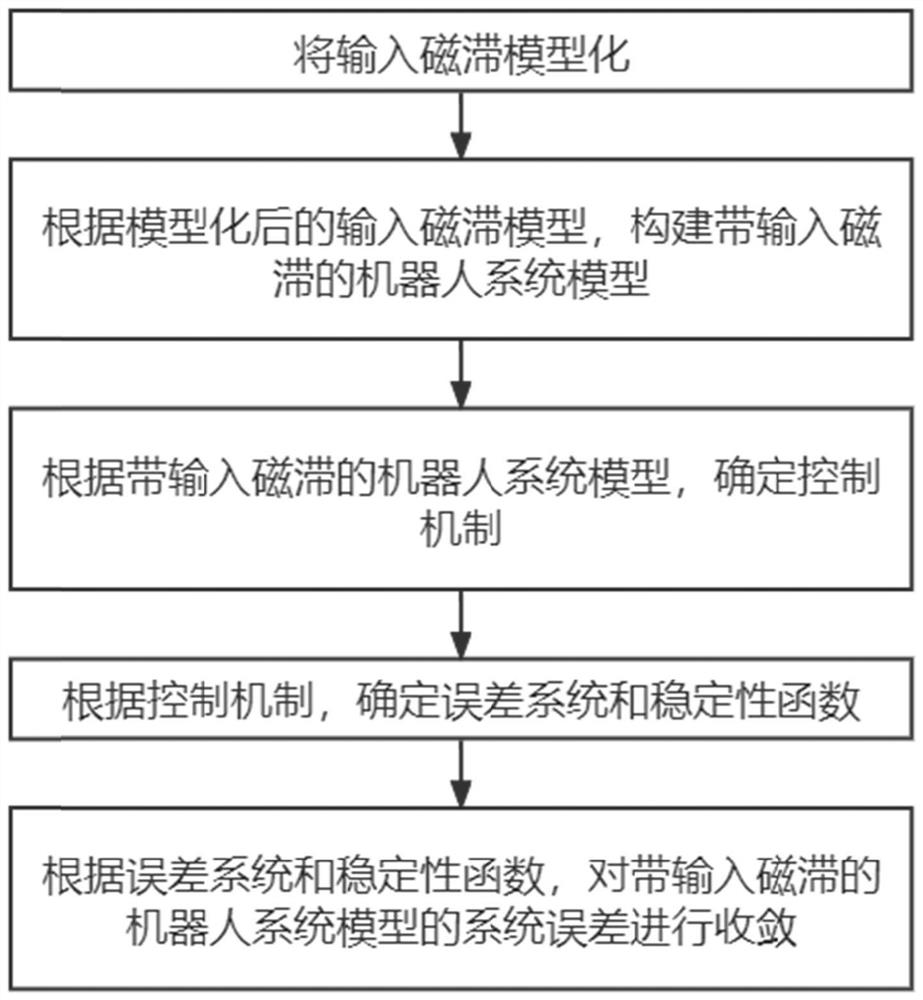
[0077] figure 1 Shown is a schematic diagram of the overall flow of the robot mixing time control method with input hysteresis provided by the embodiment of the present invention, the method includes:
[0078] Model the input hysteresis;
[0079] According to the modeled input hysteresis model, a robot system model with input hysteresis is constructed;
[0080] Determine the control mechanism based on the robot system model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More