

Visual Servo Control Method for Quadrotor UAV Based on Nonsingular Fast Terminal Sliding Mode
A four-rotor UAV and terminal sliding mode technology, which is applied in the direction of non-electric variable control, attitude control, control/adjustment system, etc., can solve problems affecting positioning accuracy, achieve good anti-interference performance, improve robustness, The effect of fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the purpose, technical solution and advantages of the present invention clearer, the specific implementation of the NFTSM-based four-rotor UAV visual servo control method of the present invention will be described below. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
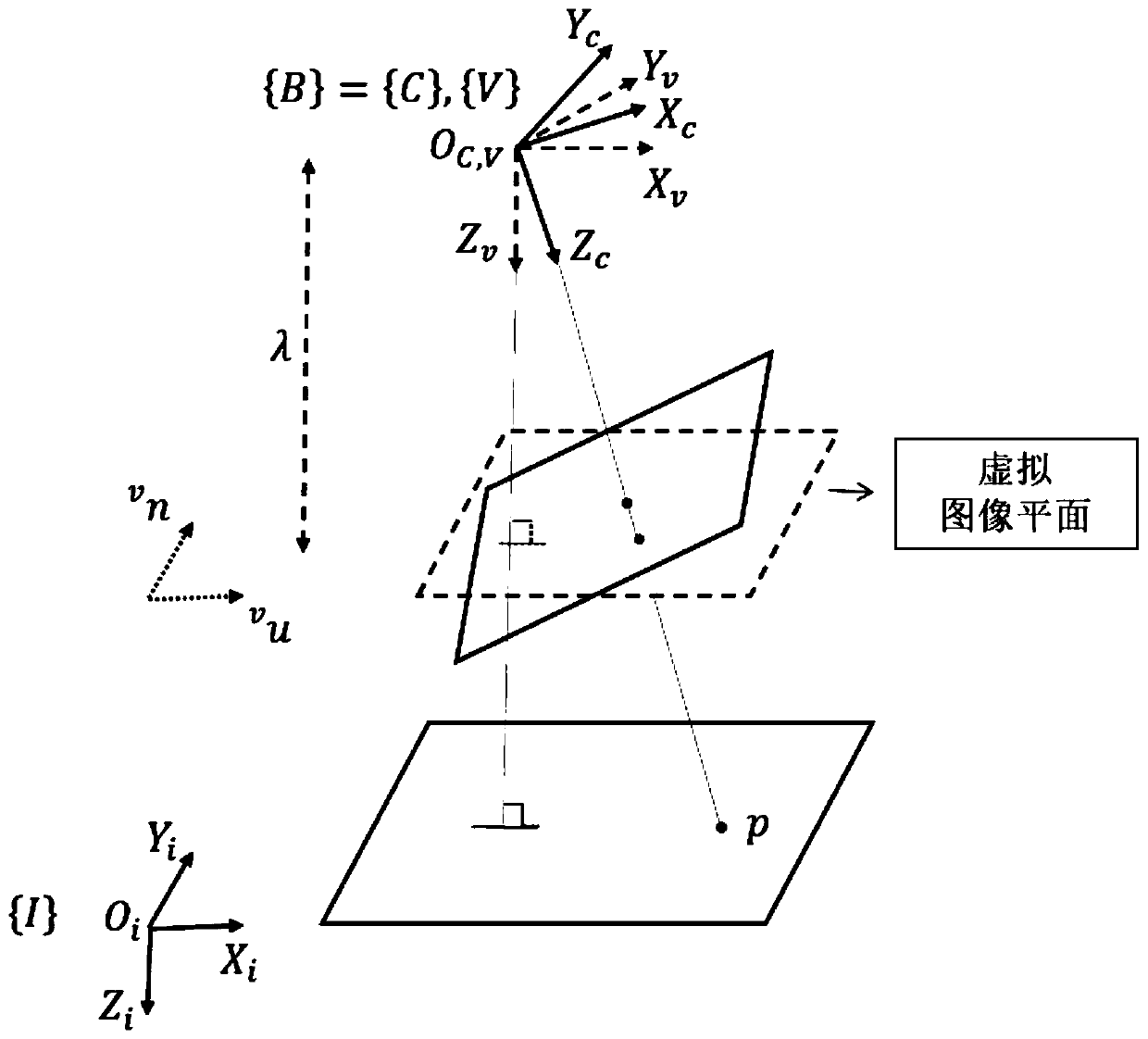
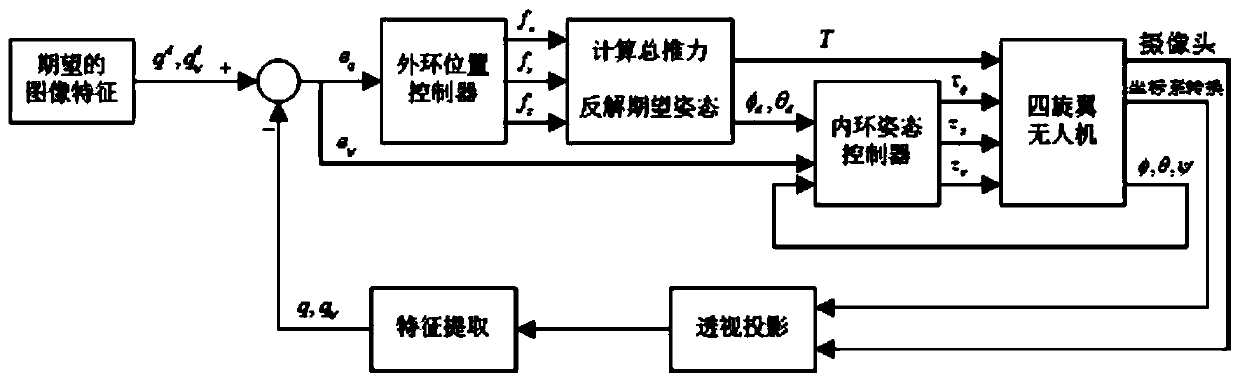
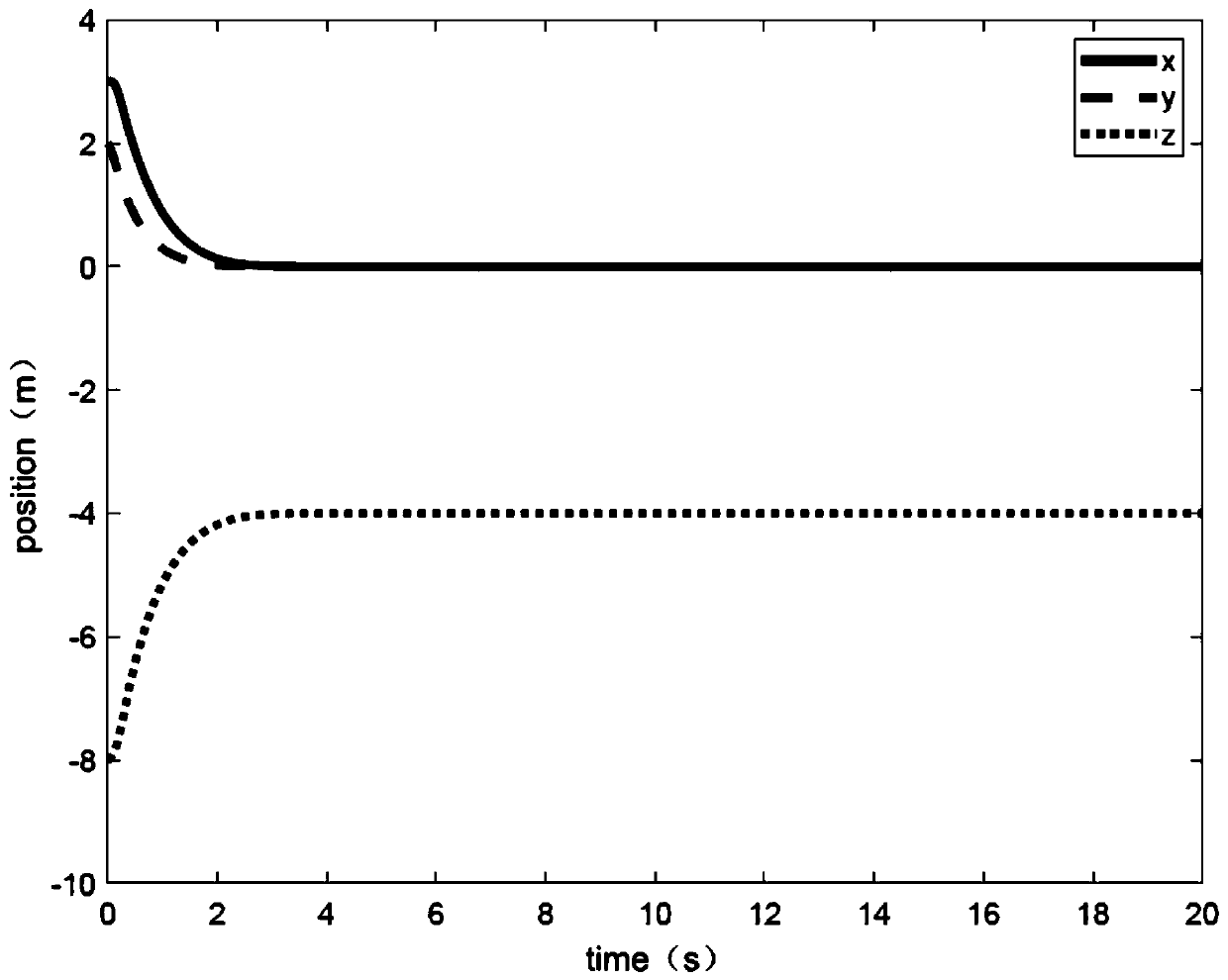
[0047] The NFTSM-based four-rotor UAV visual servo control method proposed by the present invention mainly includes four aspects: using a camera and an inertial measurement unit to collect image information, attitude angle and angular velocity information, establishing a virtual camera coordinate system to derive image dynamics, and designing four Rotorcraft position and attitude controller, simulation and experimental verification. The NFTSM-based four-rotor unmanned aerial vehicle vision servo control method of the present invention, it specifically comprises the following steps:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More