

Model-free self-adaptive nonsingular terminal sliding mode control method for sand blasting derusting parallel robot
A model-free adaptive, non-singular terminal technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as chattering and reducing tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
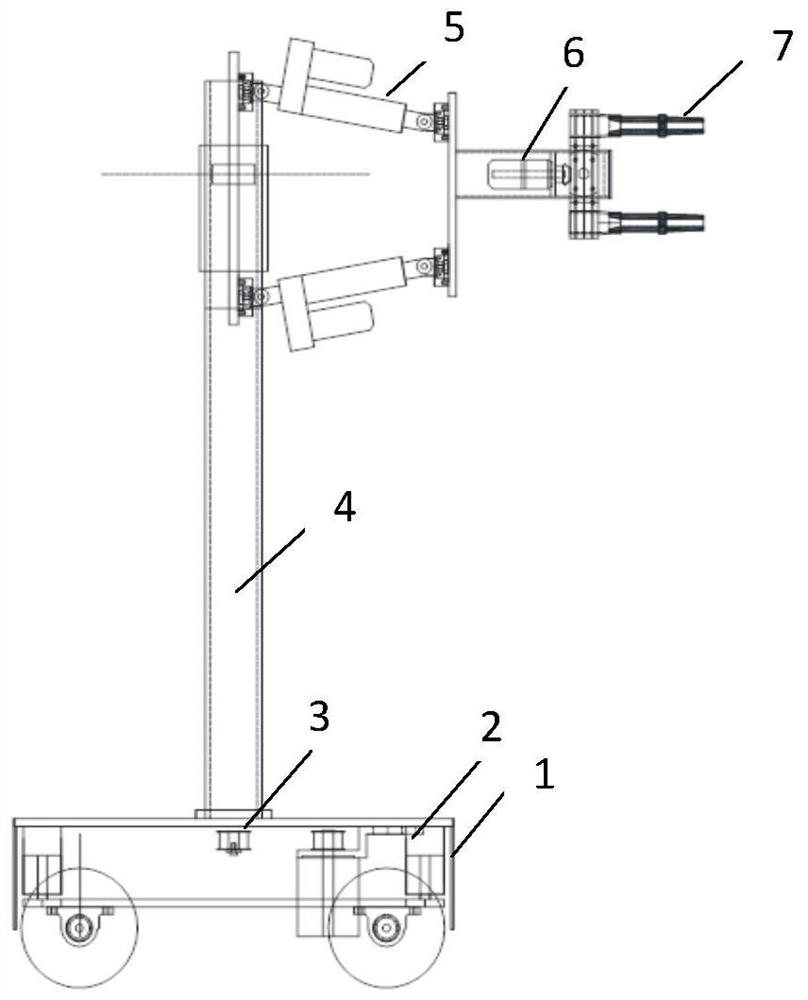
[0077] The control method of the present invention mainly focuses on the high-precision trajectory tracking control of the sandblasting and derusting parallel robot with joint friction with a kind of model-free self-adaptive sliding mode control technology. The specific implementation method of the method is as follows:
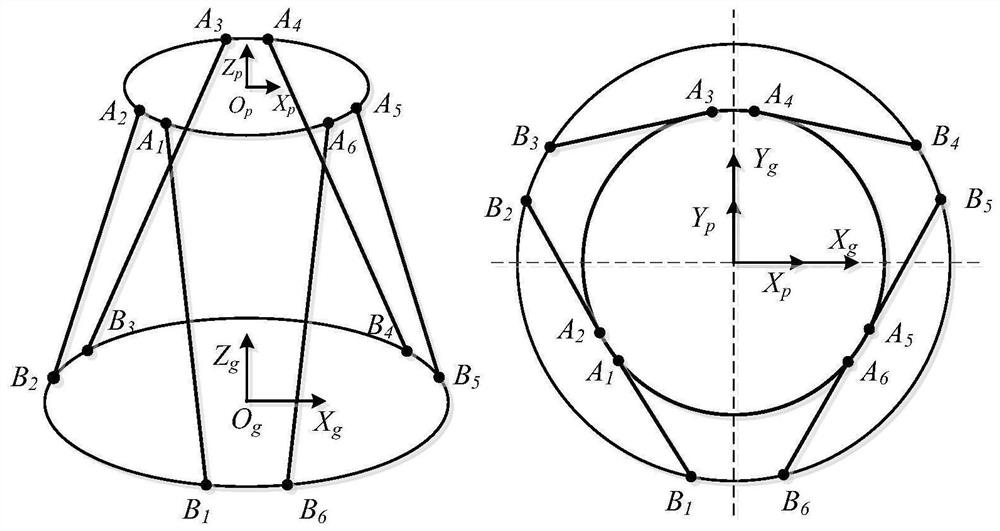
[0078] 1. Analytical method is used to analyze the inverse kinematics of the Stewart parallel mechanism for sand blasting and derusting, and the Jacobian matrix is further obtained.
[0079] exist image 3 , any vector in the moving coordinate system Transform to vector A in the base coordinate system by the coordinate transformation method i , resulting in:
[0080]
[0081] In the formula, p=[x y z] T is the origin of the moving coordinate system O p Vector representation in the base coordinate system, where T∈R 3×3 It is the rotation transformation matrix from the moving coordinate system to the base coordinates. The rotation transformation matr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More