

Parallel hybrid vehicle descending safety auxiliary control test stand and test method thereof
A hybrid electric vehicle, auxiliary control technology, applied in the direction of electrical testing/monitoring, etc., can solve the problems of not considering the dynamic characteristics of the brake, not being able to simulate the anti-drag braking of the engine, and being unable to judge the driver's driving intention, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
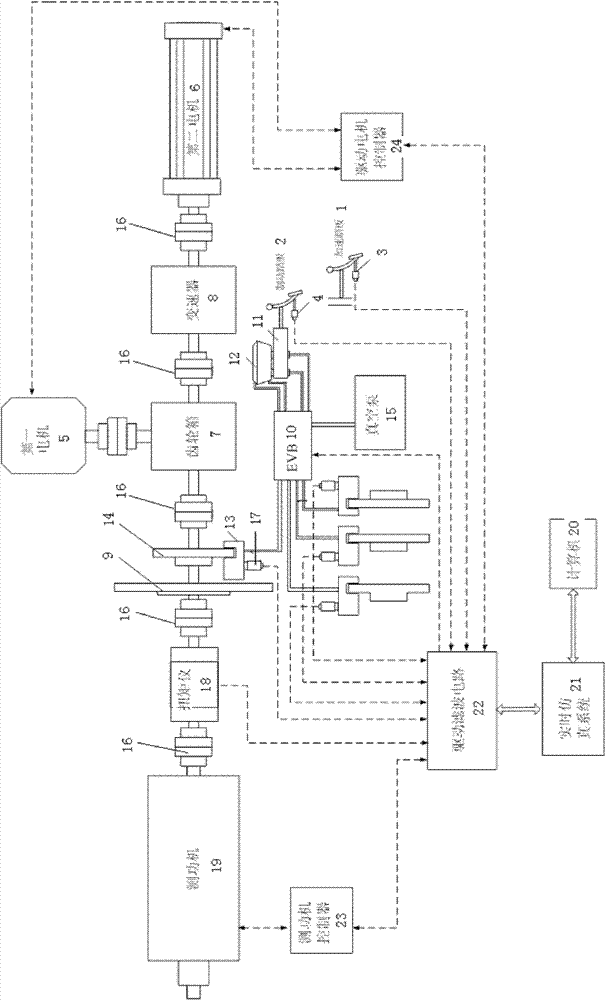
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0027] Such as figure 1 As shown, the test bench can be divided into driver control unit, execution unit, sensing unit, resistance simulation unit and simulation control unit. The sensing unit is responsible for collecting the status information of the driver control unit and the execution unit, and sending it to the simulation control unit. After the simulation control unit analyzes and processes the information, it generates control instructions and sends them to the execution unit and resistance simulation unit respectively. To simulate the driving and braking process of a parallel hybrid electric vehicle, and then verify the effectiveness of the hybrid electric vehicle's downhill auxiliary braking control.
[0028] Driver control unit: the driver control unit includes an accelerator pedal 1 and a brake pedal 2, wherein the accelerator pedal 1 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More