

Wheeled robot with traveling system
A wheeled robot and walking system technology, applied in the field of robotics, can solve problems such as slow running speed, poor off-road performance, and complex structure, and achieve the effects of simple control, fast speed, and good maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
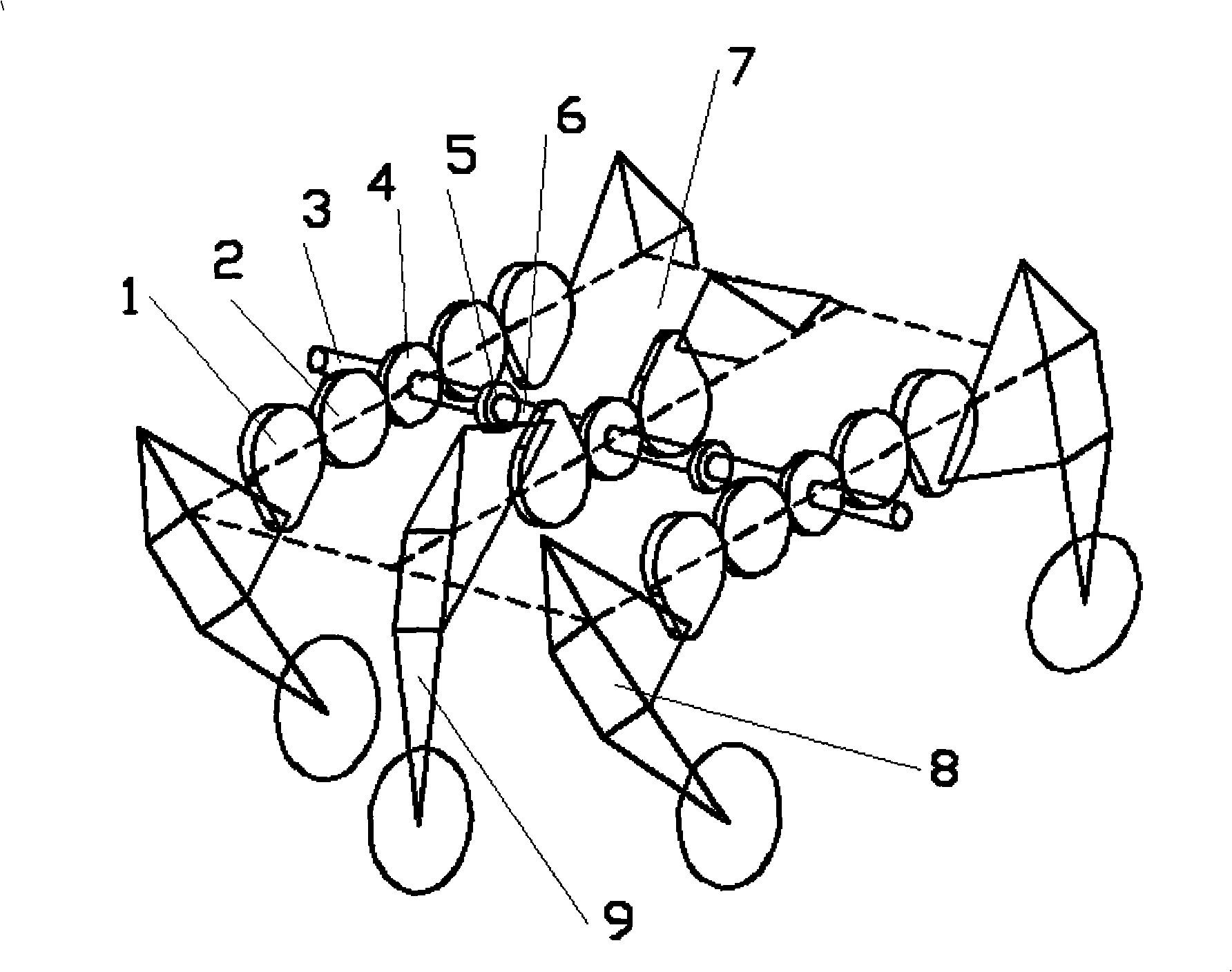
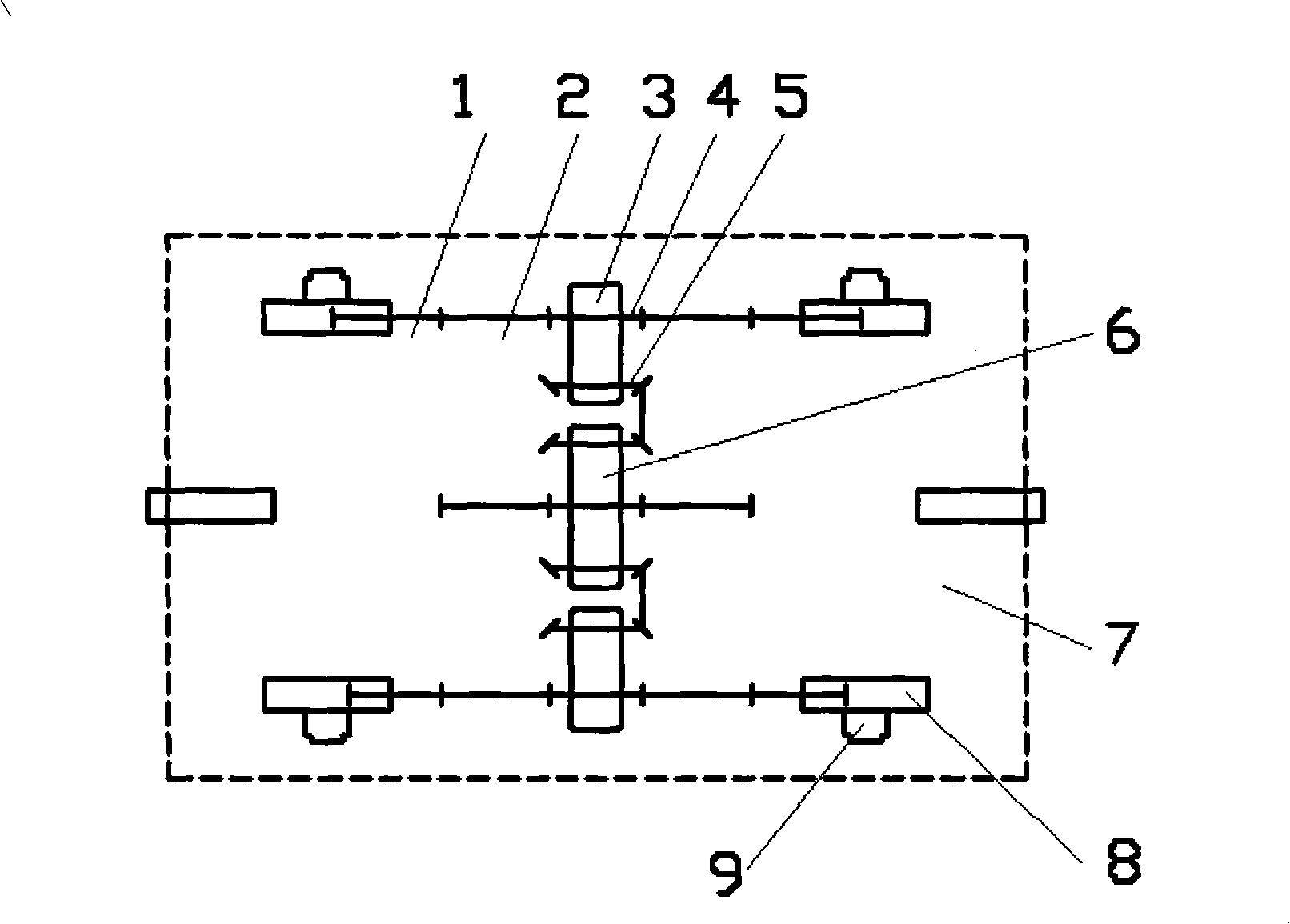
[0038] The wheeled robot with a walking system provided by the present invention can realize both wheeled driving and gait walking. Its structure is figure 1 and figure 2 Shown: It includes a fixed frame 7, a foot-type walking device and a driving device connected with the fixed frame, and the foot-type walking device and the driving device are combined to form a walking system. in:
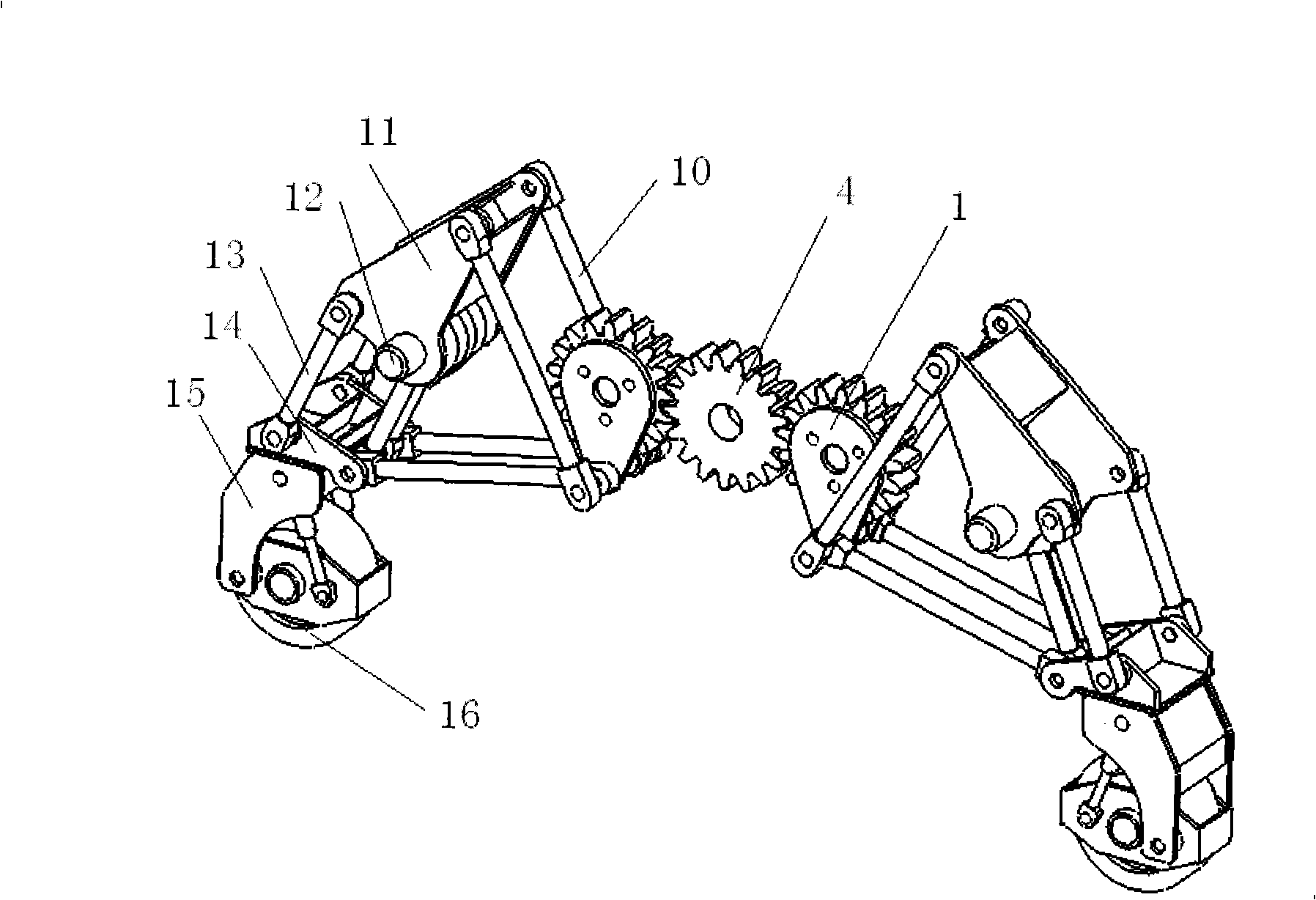
[0039] Foot-type walking device: it consists of a driven gear 1, a leg bracket and a suspension mechanism 15 equipped with wheels 16. One connection point of the leg bracket is hinged with an eccentric point of the driven gear 1, and another connection point of the leg bracket is connected. The point is hinged with the connection point of the suspension mechanism 15; the foot type running device has at least two, and the suspension mechanism 15 of the at least two foot type running devices is equipped with a motor 19 that drives the wheels 16 to run.
[0040] Driving device: a main motor and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More