

A Water Surface Detection Method Based on Laser Scanning
A technology of laser scanning and detection methods, applied in the field of robots, can solve problems such as failure of visual detection methods, mixed water surface, and inability to adapt to the actual needs of mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solution of the present invention will be described in further detail below in conjunction with specific embodiments.
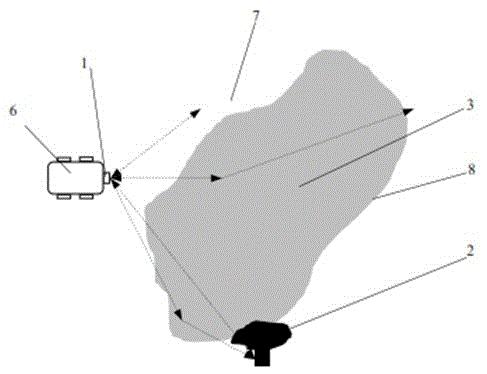
[0022] In the present embodiment, the waterside uprights are trees, the water body is a pond, and the ground is hard ground.
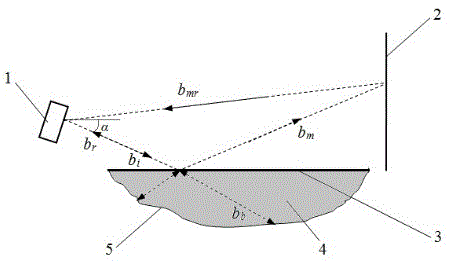
[0023] Laser scanning is based on the principle of laser beam flight to detect the environment and is not affected by lighting conditions. The laser scanner 1 is installed above or in front of the mobile robot 6 . Such as figure 1 As shown, in order to detect the road conditions in front of the mobile robot 6 and make a travel decision, the incident laser beam b emitted by the laser scanner 1 i It is incident on the water surface 3 of the pond in front with a small horizontal inclination angle α. Incident laser beam b i Three optical phenomena of diffuse reflection, refraction and specular reflection occur simultaneously on the water surface 3:
[0024] (1) Reflected laser beam b returned by diffuse reflectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More