Parallel robot joint structure
A joint structure and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as reducing operating life and wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0022] In order to describe in detail the technical features of the present invention, the following preferred embodiments are given and described as follows in conjunction with the accompanying drawings, wherein:
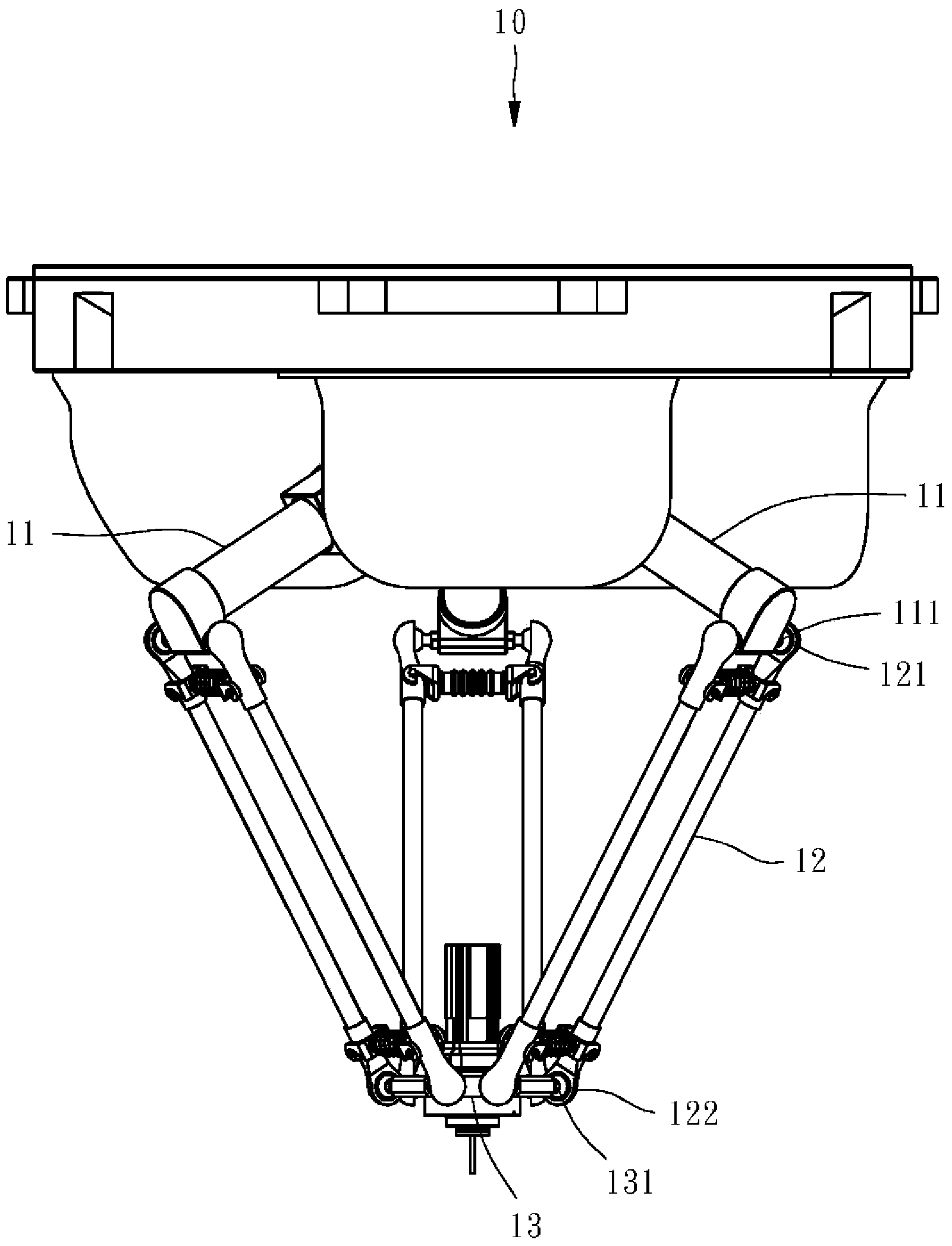
[0023] Such as figure 1 As shown, the joint structure of a parallel robot provided by the first preferred embodiment of the present invention is provided on a parallel robot 10, and the parallel robot 10 has a plurality of first rods 11, and each of the first rods 11 has one end It has a first connecting part 111, and the other end is driven by external force. A plurality of second rods 12 have a second connecting part 121 and a third connecting part 122 at both ends of each second rod 12, and each of the second connecting parts 12 Parts 121 are respectively connected to each of the first connecting parts 111, a moving platform 13 has a plurality of fourth connecting parts 131, each of the fourth connecting parts 131 is respectively connected to each of the third c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More