

Method and equipment for calibrating fighter weapon system by fiber-optic gyroscope
A fiber optic gyroscope and fiber optic gyroscope technology, which is applied in the field of weapon calibration, can solve problems such as low efficiency, unguaranteed target calibration accuracy, and inability to meet target calibration at any time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0047] When it is necessary to calibrate the head-up display in the fighter weapon system, the following methods are used for calibration:
[0048] A method for calibrating the head-up display of a fighter plane using an optical fiber gyroscope according to the present invention comprises the following steps:
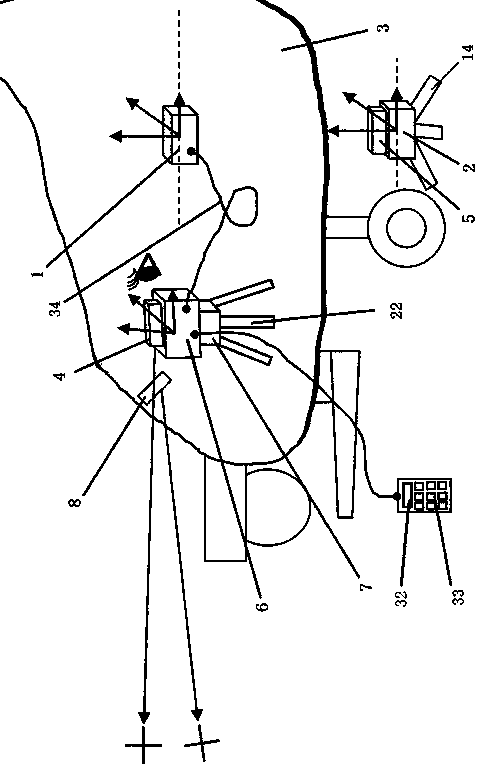
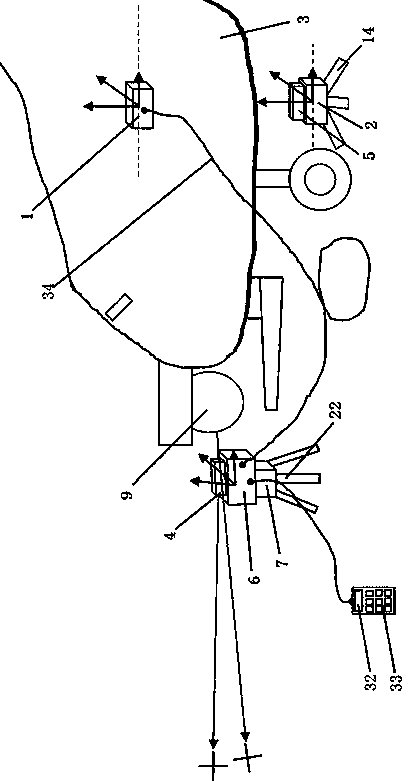
[0049] ① Install the first fiber optic gyro module 1 on the fighter body 3, the first fiber optic gyro module 1 includes three fiber optic gyroscopes and corresponding integral calculation modules arranged in the directions of three mutually perpendicular space coordinate axes of x, y, and z, The angular velocity information measured by the three fiber optic gyroscopes is integrated through the integral calculation module to obtain the angle data of the three axis directions of the current first fiber optic gyroscope module 1;
[0050] ②Place the body longitudinal axis orientation determination device 2 under the body 3, measure the orientation and posture of the body 3...
Embodiment 2
[0066] When it is necessary to calibrate the photoelectric stabilized sight in the fighter weapon system, the following methods are used for calibration:
[0067] A method for calibrating the photoelectric stabilization of fighter jets using a fiber optic gyroscope according to the present invention comprises the following steps:
[0068] ① Install the first fiber optic gyro module 1 on the fighter body 3. The first fiber optic gyro module 1 is composed of three fiber optic gyroscopes and corresponding integral calculation modules arranged in the directions of three mutually perpendicular space coordinate axes of x, y, and z , the angular velocity information measured by the three fiber optic gyroscopes is integrated through the integral calculation module to obtain the angle data of the three axis directions of the current first fiber optic gyroscope module 1;
[0069] ②Place the body longitudinal axis orientation determination device 2 under the body 3, measure the orientati...
Embodiment 3
[0082] When it is determined that the direction of the HUD line of sight is correct, the aircraft gun in the fighter weapon system needs to be calibrated, and the following method is used for calibration:
[0083] A method for calibrating fighter aircraft guns using an optical fiber gyroscope according to the present invention comprises the following steps:
[0084] ① Install the first fiber optic gyro module 1 on the fighter body 3. The first fiber optic gyro module 1 is composed of three fiber optic gyroscopes and corresponding integral calculation modules arranged in the directions of three mutually perpendicular space coordinate axes of x, y, and z , the angular velocity information measured by the three fiber optic gyroscopes is integrated through the integral calculation module to obtain the angle data of the three axis directions of the current first fiber optic gyroscope module 1;
[0085] ② Place the azimuth and attitude determination instrument directly behind the he...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More