

G2o-based SLAM rear end optimization algorithm method
A technology for optimizing algorithms and nodes, used in computing, computer components, navigation computing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0092] In the embodiment of the present invention, the proposed DCS1 algorithm method is integrated based on the g2o platform. g2o is an open source framework for general graph optimization. This framework mainly solves the problem of nonlinear least squares based on graph optimization, which is known in the pose graph Back-end optimization under the circumstances. In the implementation process, the back-end optimization problem of SLAM problem was solved using the proposed DCS1 algorithm in the g2o platform, and the optimized pose sequence was output.
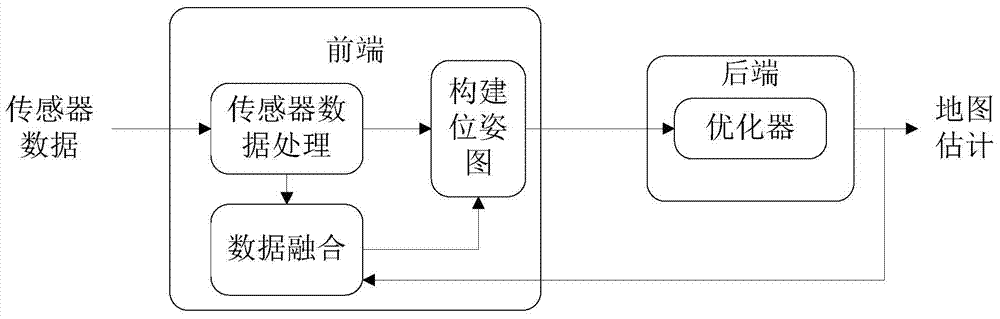
[0093] Generally, SLAM algorithms based on graph optimization include two steps: graph construction and graph optimization. The construction of the graph is called the front end, and the optimization of the graph is called the back end. figure 1 Shows the whole process of graph-based SLAM. The front end processes the raw sensor data obtained by the robot and performs data fusion to complete the construction of the pose map. Af...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More