

Determination method for shape shifting robot attitude transformation optimal path
A technology for attitude transformation and method determination, which is applied to motor vehicles, tracked vehicles, transportation and packaging, etc., and can solve problems such as no scientific and effective solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
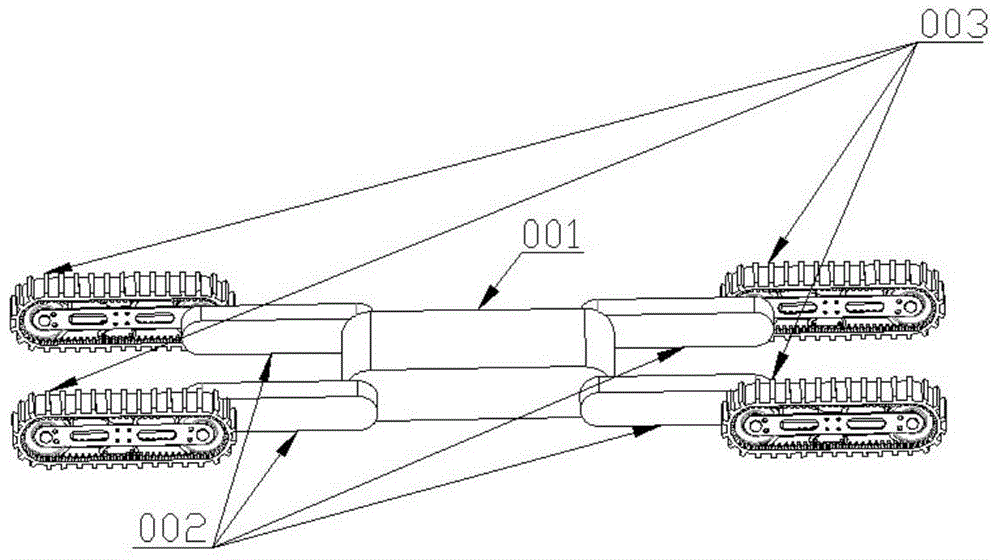
[0042] The embodiment of the present invention is a deformed mobile robot, the length of the body 001 is 648mm, the width of the body 001 is 450mm, the length of the thigh 002 is 360mm, and the length of the shank 003 is 262mm, take X dMax It is a quarter of the length of the entire fuselage 001 when the robot is fully extended: 473mm, take Y dMax It is the height of the center of gravity of the whole fuselage 001 when standing at the highest point: 622mm, and the rotation angles of each joint are respectively calculated as integral multiples of 90° or 45°.
[0043] In order to find the best way of robot posture deformation described in the embodiment, adopt the present invention to determine the process following program of its posture best deformation way:
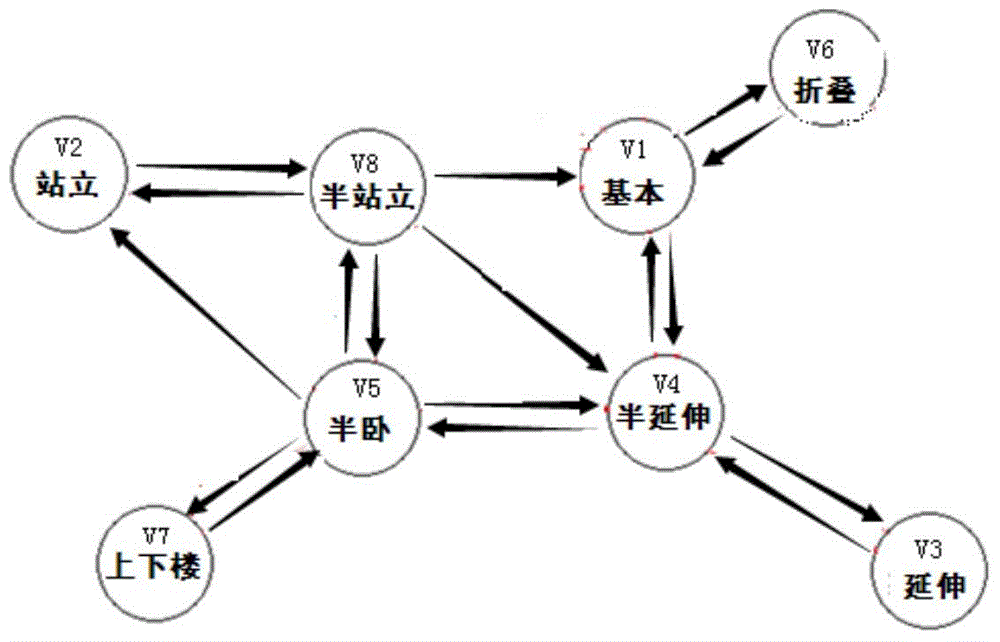
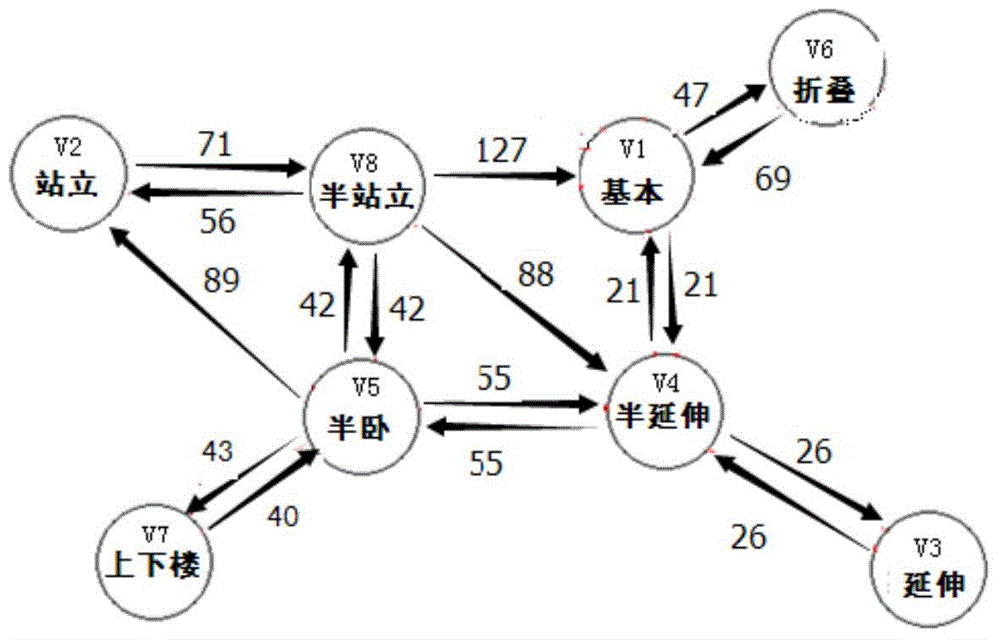
[0044] The first step is to establish the 8 possible deformation poses of the deformable mobile robot, and take a name code corresponding to the vertices of the graph theory, as shown in Table 1, and the corresponding ei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More