

A parallel lower extremity exoskeleton rehabilitation training device
A technology of rehabilitation training and exoskeleton, which is applied in the field of medical rehabilitation system, can solve the problems of inability to control the expansion and contraction of the cylinder in real time, danger, complex installation and adjustment of the adjustment mechanism, etc., and achieve the effect of powerful lower limb rehabilitation function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
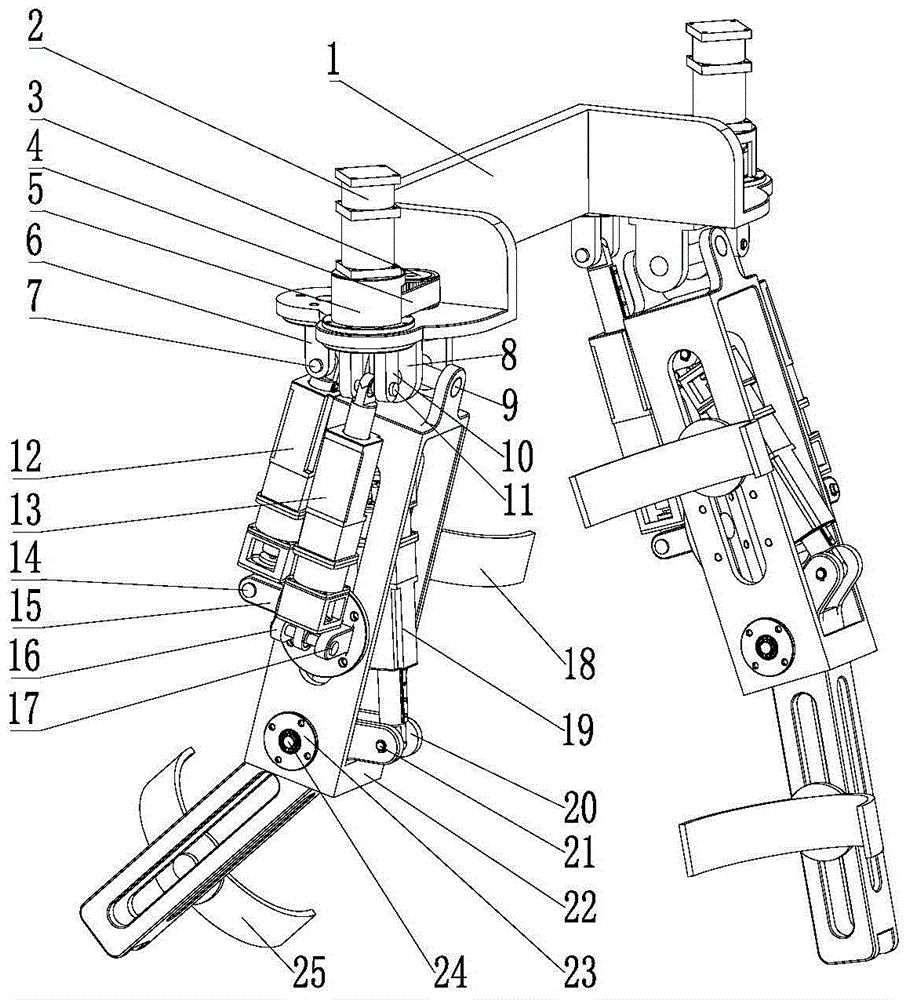
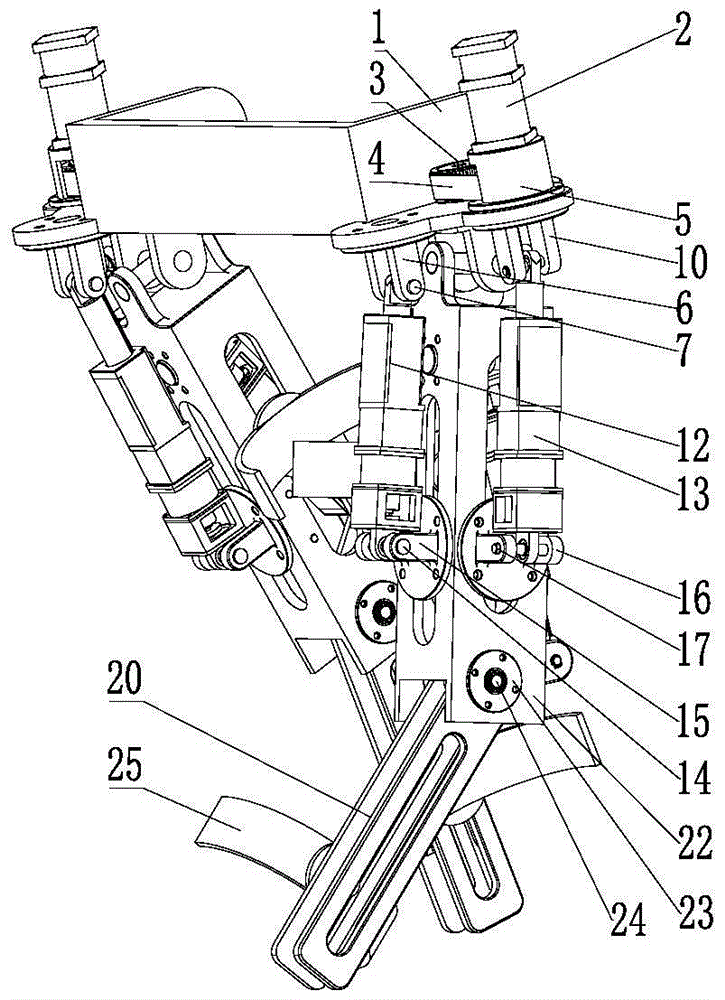
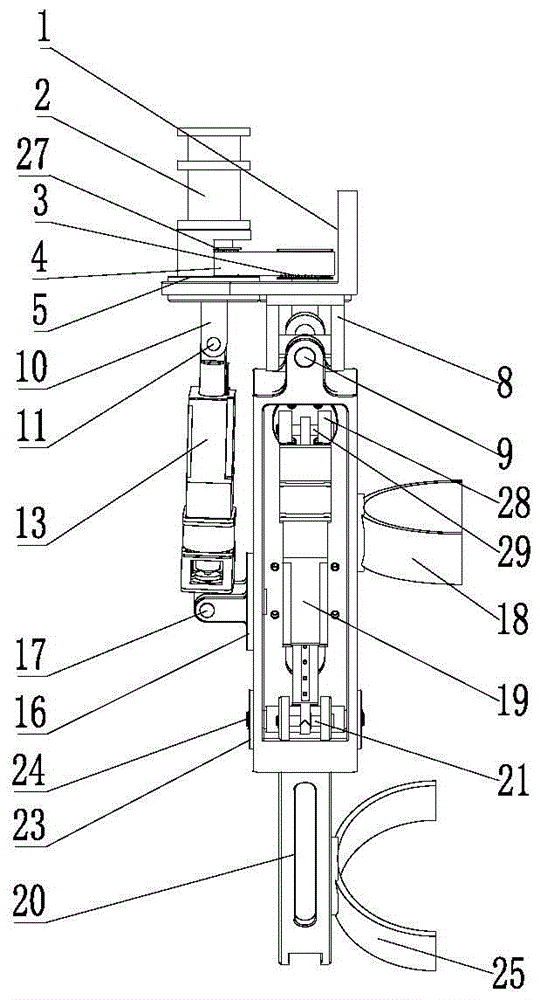
[0021] The purpose of the present invention is to provide a parallel exoskeleton rehabilitation training device for lower limbs, which includes a waist support frame, a hip joint gyration unit, a hip joint adduction and abduction unit, a hip joint flexion and extension unit, and a knee joint flexion and extension unit. The hip joint rotation unit is mainly composed of a shoulder rotation motor, a rotation motor seat, a pulley and a belt, and a Hooke hinge bracket. Driven by the rotation motor, the hip joint can be rotated internally, externally and circularly; The joint adduction and abduction unit is mainly composed of the hip joint retraction and extension electric cylinder, spherical bearing, electric cylinder lower end support and push rod head support, and the hip joint Hooke hinge. retraction and abduction movements; the hip joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More