

Single-person positioning navigator and positioning navigation method based on multi-sensor fusion
A multi-sensor fusion, positioning and navigation technology, applied in the field of inertial systems, can solve the problems of inability to achieve indoor positioning and fully autonomous navigation, and achieve the effects of light weight, small size and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
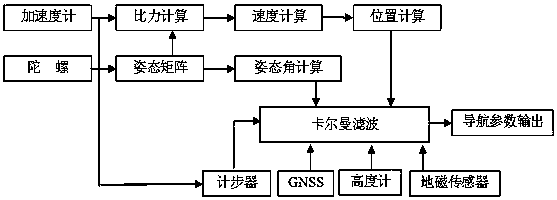
[0018] see figure 1 , as can be seen from the figure, the present invention is based on a single-person positioning navigator based on multi-sensor fusion, including a global satellite positioning system, a barometer for measuring altitude, a three-axis gyroscope, a three-axis accelerometer and a three-axis geomagnetic sensor, A three-axis gyroscope and a three-axis accelerometer form a micromechanical inertial navigation unit. The attitude angle information obtained by the gyroscope, the position information obtained by the accelerometer, the heading information of the human body provided by the geomagnetic sensor, the altitude information provided by the barometer, and the accelerometer calculate The step frequency information and the position and speed information provided by the global satellite positioning system are input into the Kalma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More