

A computer vision-based navigation method, device and system for the blind
A computer vision and blind navigation technology, applied in the field of computer vision, can solve problems such as the popularization of unfavorable navigation technology, increase in manufacturing cost, and difficulty in use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
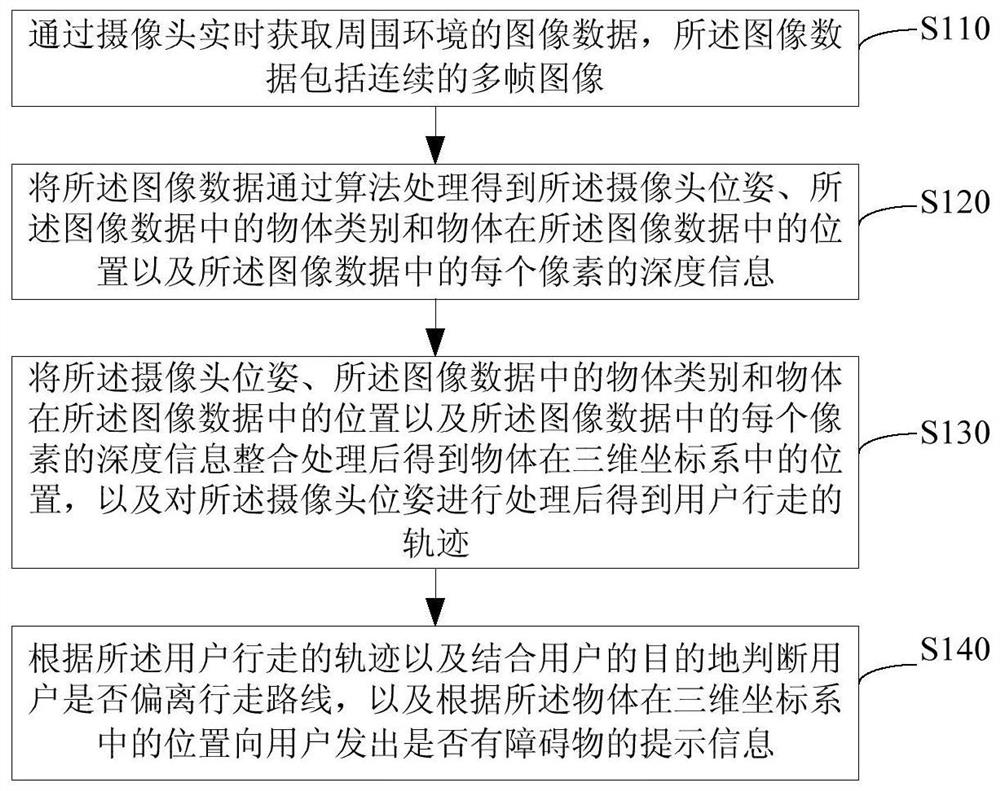
[0051] As a first aspect of the present invention, a computer vision-based navigation method for the blind is provided, wherein, as figure 1 Shown, described blind person's navigation method based on computer vision comprises:
[0052] S110. Obtain image data of the surrounding environment in real time through the camera, where the image data includes continuous multi-frame images;
[0053] S120. Process the image data through an algorithm to obtain the camera pose, the object category in the image data, the position of the object in the image data, and the depth information of each pixel in the image data;
[0054] S130. Integrate and process the camera pose,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More