

3D point cloud automatic registration method
A three-dimensional point cloud, fully automatic technology, applied in image data processing, instruments, details involving 3D image data, etc., can solve the problem of not fully automatic registration, roughness, etc., and achieve good automatic registration and simplify points. effect on quantity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in combination with specific embodiments. However, it should not be understood that the scope of the above subject matter of the present invention is limited to the following embodiments, and all technologies realized based on the content of the present invention belong to the scope of the present invention.
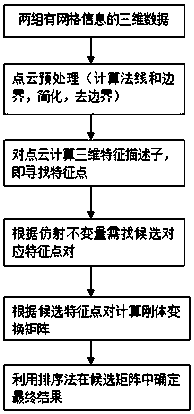
[0031] Specifically, such as figure 1 As shown, the present invention is described in conjunction with a specific embodiment. Including the following steps:
[0032] S100: Input two sets of point cloud data A and B with triangular grids, and preprocess the data. The normal and boundary of the two sets of point clouds are calculated separately for the original grid point cloud data. Generally, structured light measurement equipment can measure up to 100,000 data points. At the same time, the obtained point cloud data is very densely arranged, and there is a lot of redundancy, which will cause slow c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More