Robot motion control method and device based on actor-critic approach
A technology of robot movement and control method, applied in the field of machine learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
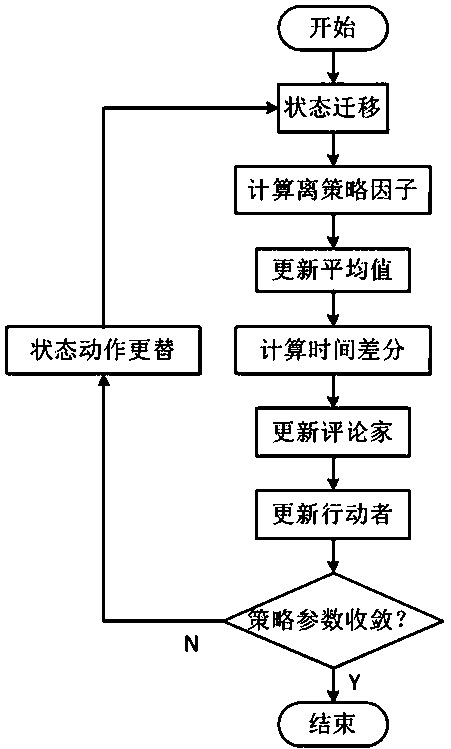
[0045] Embodiment 1: A robot motion control method, collects video data through a camera, processes the video data to obtain the position information of the current robot, obstacle distribution information, and given destination information; obtains a map through the analysis of the video data, and uses The position of the robot is used as the state of the robot x , the direction of motion of the robot as the action u ;Such as figure 1 As shown, the specific control method includes learning process and motion control.
[0046] The learning process includes the following steps:
[0047] 1 State transition
[0048] According to the environment model, the state of the robot is transferred, and then the action that should be executed in the new state is selected according to the behavior strategy. The behavior strategy adopts a completely random strategy, that is, the selection probabilities of all actions in any state are equal and the sum is 1.
[0049] 2 Calculate the off-...
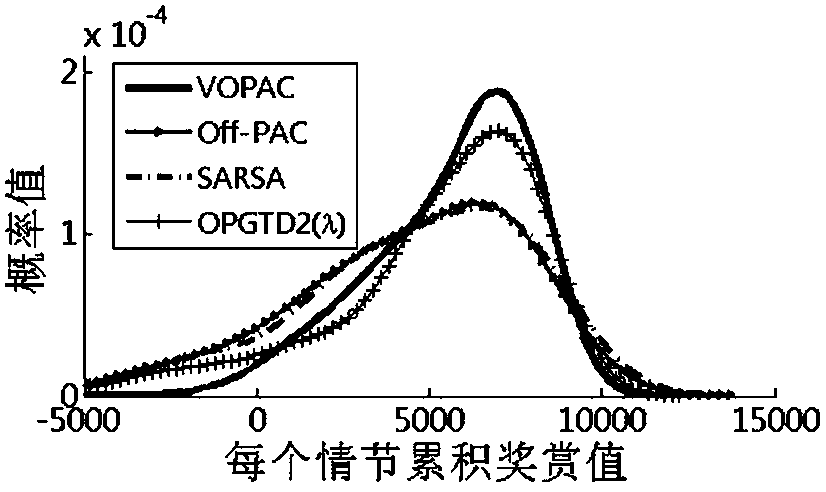
Embodiment 8014
[0075] Off-PAC 1242.4
[0076] OPGTD2(λ) 1125.2
[0077] SARS-1747.8
[0078] In the method of the present invention, change the result that different μ value obtains:
[0079] VOPAC
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap