

Industrial robot track planning vertical speed control method based on trigonometric function
An industrial robot, trigonometric function technology, applied in two-dimensional position/channel control and other directions, can solve the problems of increased driving torque and the first derivative of driving torque, large joint impact, and difficult trajectory tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0096] The invention can generate smooth and continuous curves, easily realize the tracking of expected trajectory, and is suitable for trajectory planning of industrial robots. The embodiment solves the problem that the trajectory planning of the industrial robot adopts trapezoidal acceleration and deceleration control to fit the linear segment trajectory. The jerk step change in the method of S-curve acceleration and deceleration control fitting the linear segment trajectory will still cause a certain degree of flexible impact on the robot joints.
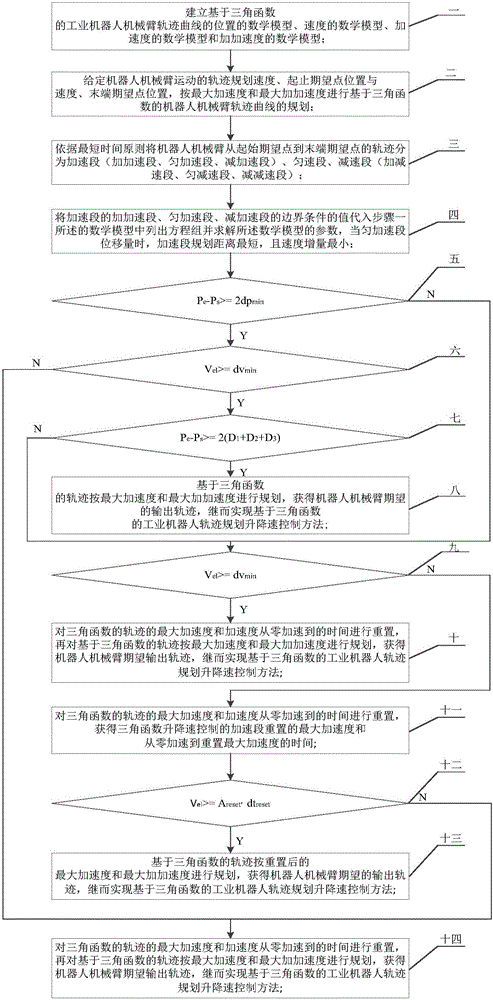
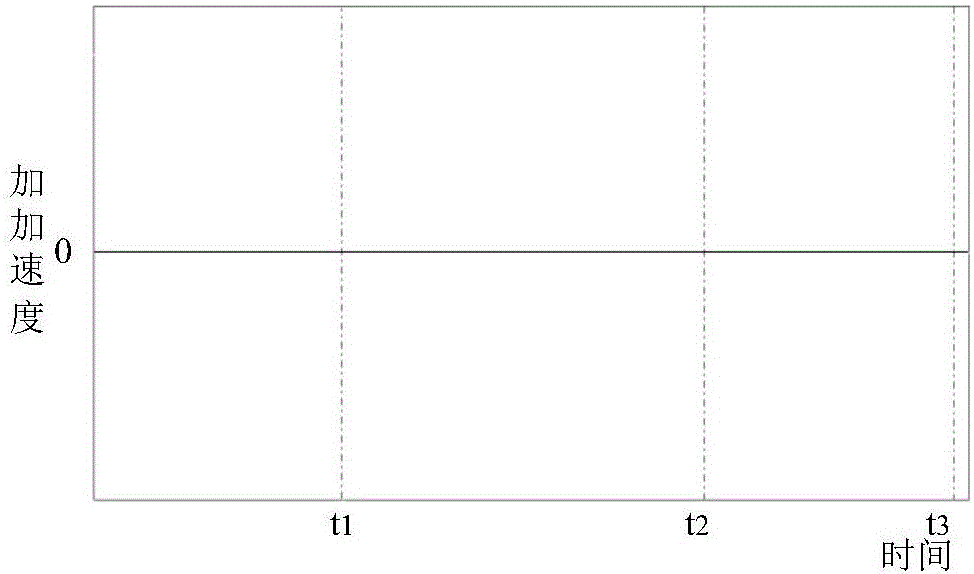
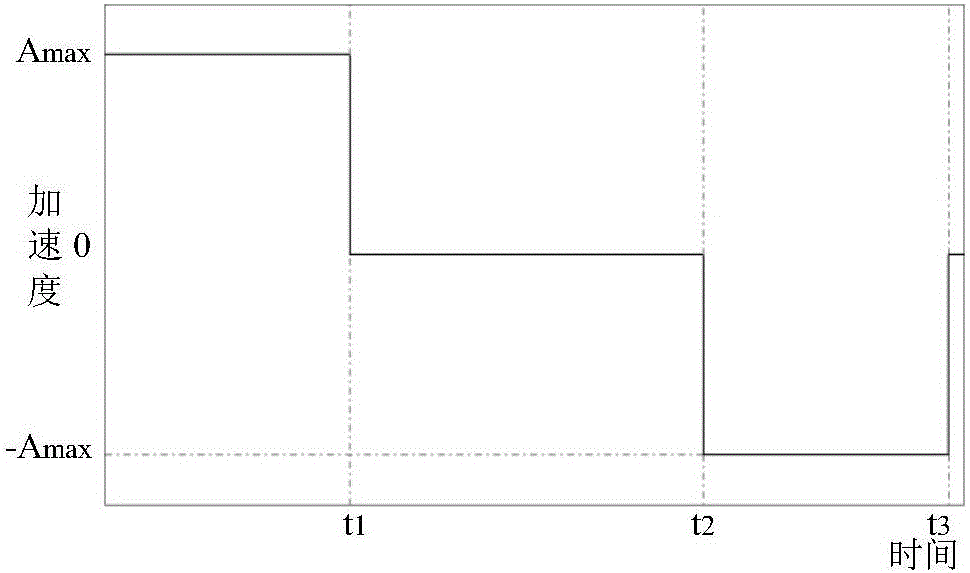
[0097] Embodiment First, the mathematical model of position, velocity, acceleration and jerk based on trigonometric functions is given, and the position and velocity parameters of two expected points at the start and end points of the given trajectory planning curve are given, and then, the parameter values of the boundary conditions are taken with Enter into the established mathematical model, list the equations and find out t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More