

Robot off line programming system and method
An off-line programming and robotics technology, applied in the field of robotics, can solve problems such as difficulty in guaranteeing the discrete accuracy of curves, lack of independent drawing of trajectories, independent model modeling and virtual construction, and lack of diversity of robot models, etc., to achieve simple operation and high work efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The solution of the present invention will be further described in detail below in conjunction with the embodiments and drawings, but the implementation of the present invention is not limited thereto.
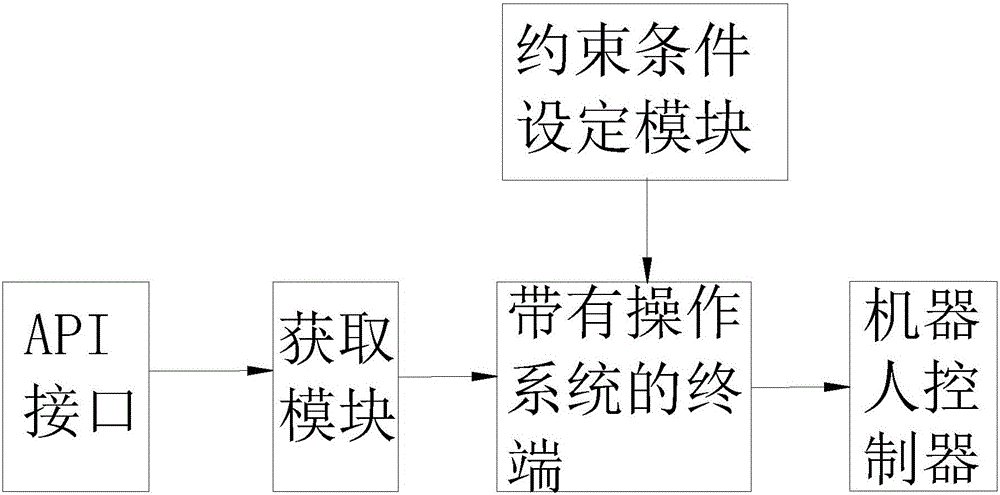
[0035] The invention provides a robot off-line programming system, comprising:
[0036] A constraint setting module for setting robot kinematic constraints;
[0037] An acquisition module for acquiring robot working objects, robots and their tooling 3D models, robot motion path primitives and their pose information;
[0038] And a terminal with an operating system for building a three-dimensional virtual environment for robots;
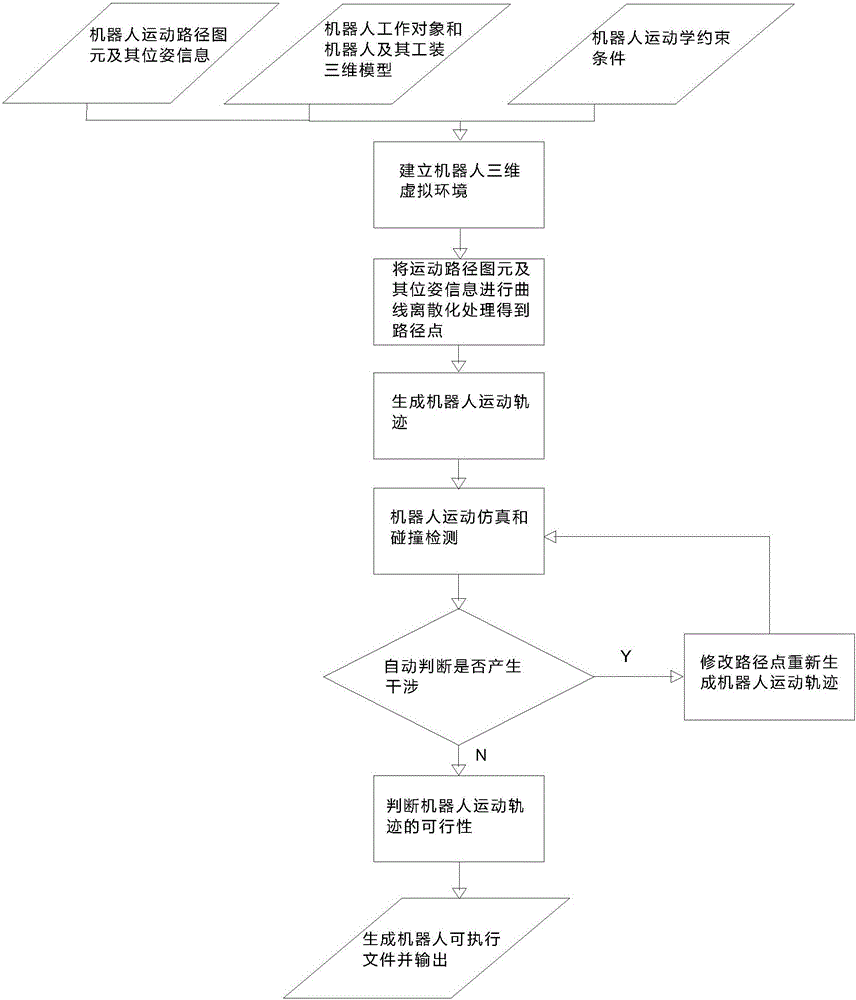
[0039]The specific workflow of the system is to import the robot kinematics constraints, the 3D model of the robot's work object, the 3D model of the robot and its tooling into the robot's 3D virtual environment, and curve the extracted robot motion path primitives and their pose information. Discretization, extracting path points, generating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More