

A Biped Walking Robot Mechanism with Parallel Leg Structure
A walking robot and robot technology, applied in the field of robotics, can solve the problems that few people study on biped walking robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described in conjunction with the accompanying drawings.
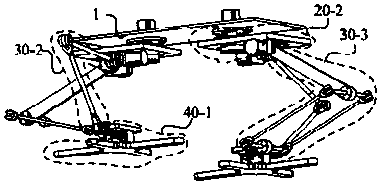
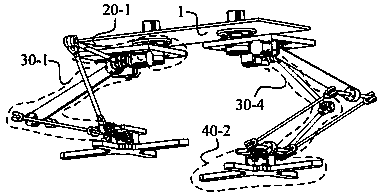
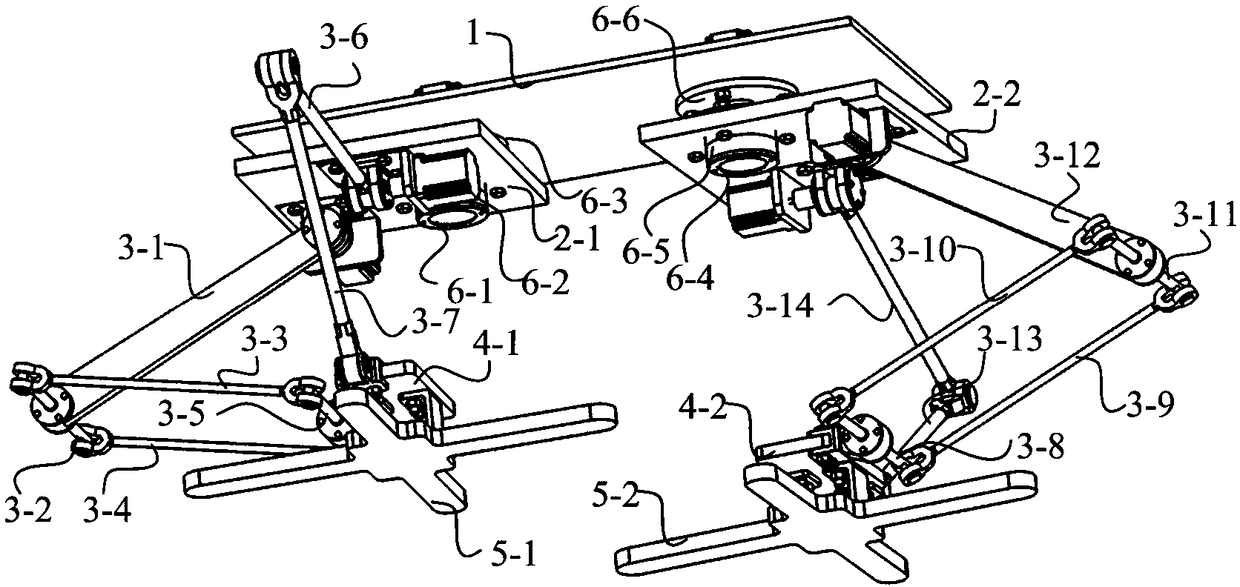
[0082] A bipedal walking robot mechanism with parallel leg structure, such as figure 1 , 2 , 3 and 4, the robot mechanism includes: base 1, first and second crotch components 20-1, 20-2, first to fourth rotating components 30-1, 30-2, 30-3 , 30-4, the first and second foot components 40-1, 40-2.
[0083] The connection between the first crotch component 20-1 and the base 1 and the first and second rotating components 30-1, 30-2:
[0084] The first motor connector 7-1 of the first rotating assembly 30-1 is fixedly connected with the first crotch base 2-1 of the first crotch assembly 20-1. The second motor connector 7-2 of the second rotating assembly 30-2 is fixedly connected to the first crotch base 2-1 of the first crotch assembly 20-1. The third crotch connection part 6-3 of the first crotch base 2-1 of the first crotch component 20-1 is fixedly connected with the base...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More