

Biped robot with variable-rigidity ankle joints
A biped robot and ankle joint technology, applied in the field of humanoid robots, can solve the problem that the comprehensive performance of robots surpasses that of humans
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
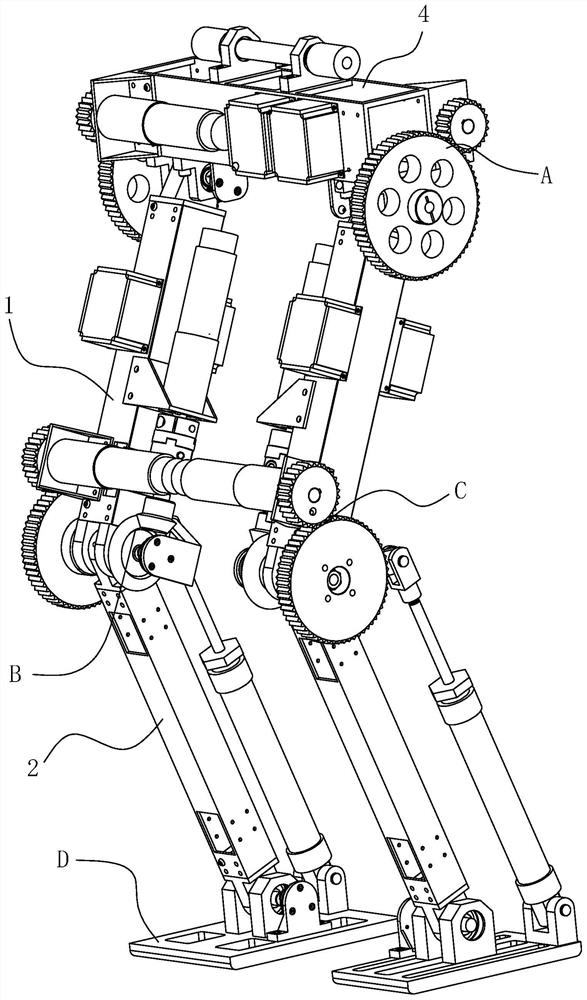
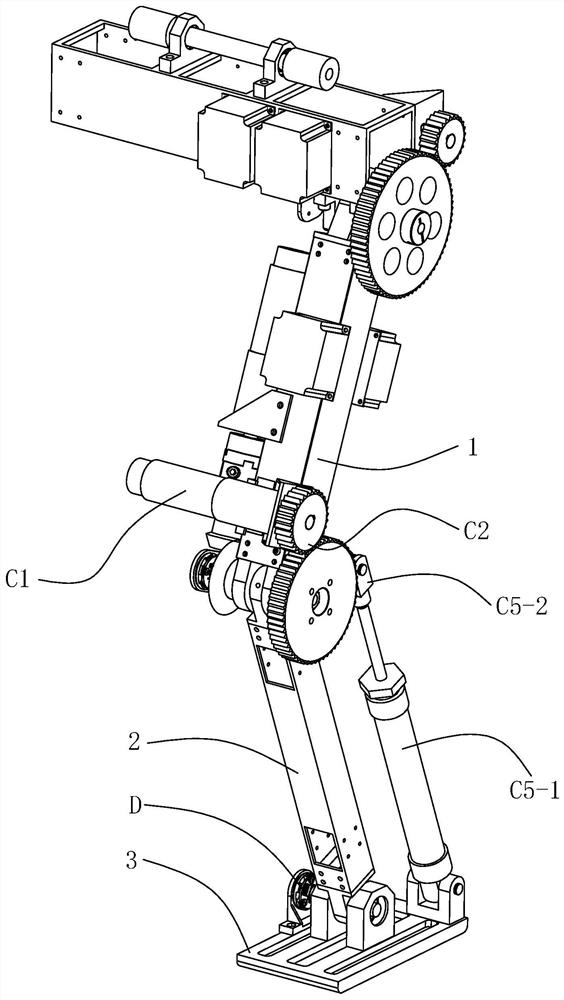
[0016] see Figure 1-Figure 3 As shown, a biped robot with a variable stiffness ankle joint in this embodiment includes a left leg, a right leg and a pelvis 4, the left leg and the right leg respectively include a thigh 1, a calf 2 and a foot 3, and the pelvis 4 The thigh 1 is connected through the hip joint A, the thigh 1 is connected with the calf 2 through the knee joint B, the calf 2 is connected with the foot 3 through the ankle joint C, and the left leg and the right leg are connected through the pelvis 4;
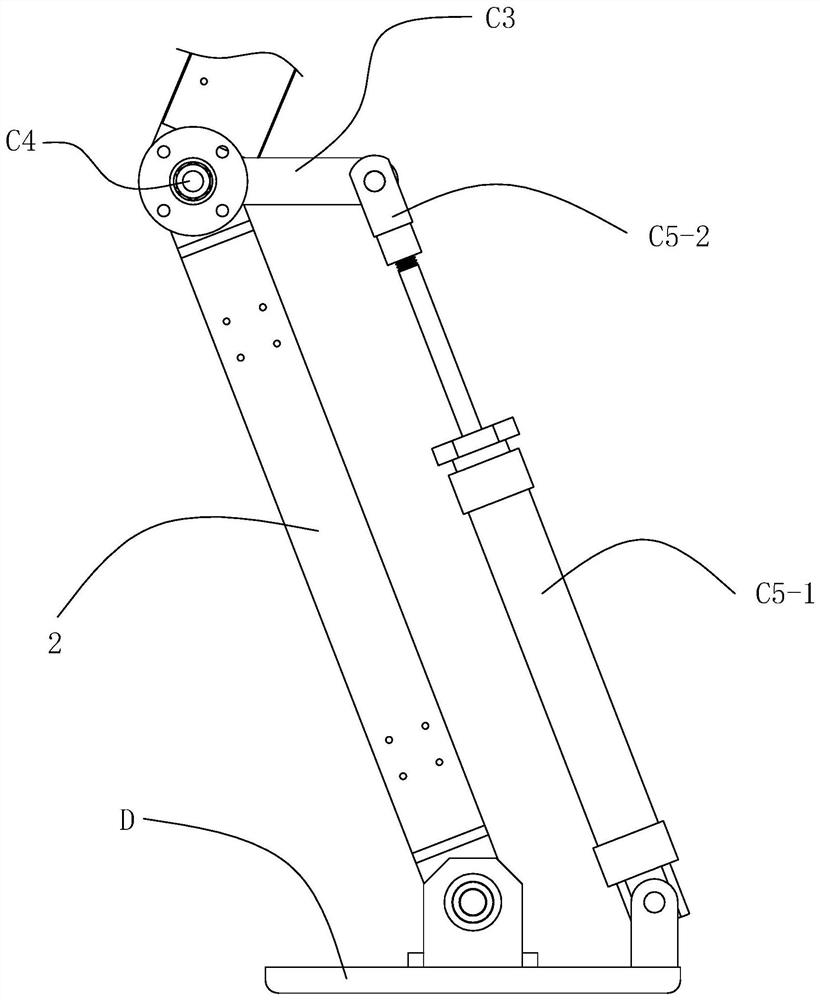
[0017] The ankle joint C includes the ankle joint driving motor C1, the ankle joint transmission gear pair C2, the rotating crank C3, the ankle joint rotation shaft C4, and the passive exhaust variable stiffness mechanism C5; the passive exhaust variable stiffness mechanism C5 includes the cylinder C5-1 and connecting parts C5-2, the piston rod end of the cylinder C5-1 is equipped with a connecting piece C5-2, the ankle joint driving motor C1 is installed on the thig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More