

A biped robot with flexible ankle joints
A biped robot and ankle joint technology, applied in the field of humanoid robots, can solve the problems of poor ground adaptability, large energy loss, and low ability efficiency, and achieve the effects of improved motion performance, low energy loss, and improved energy efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
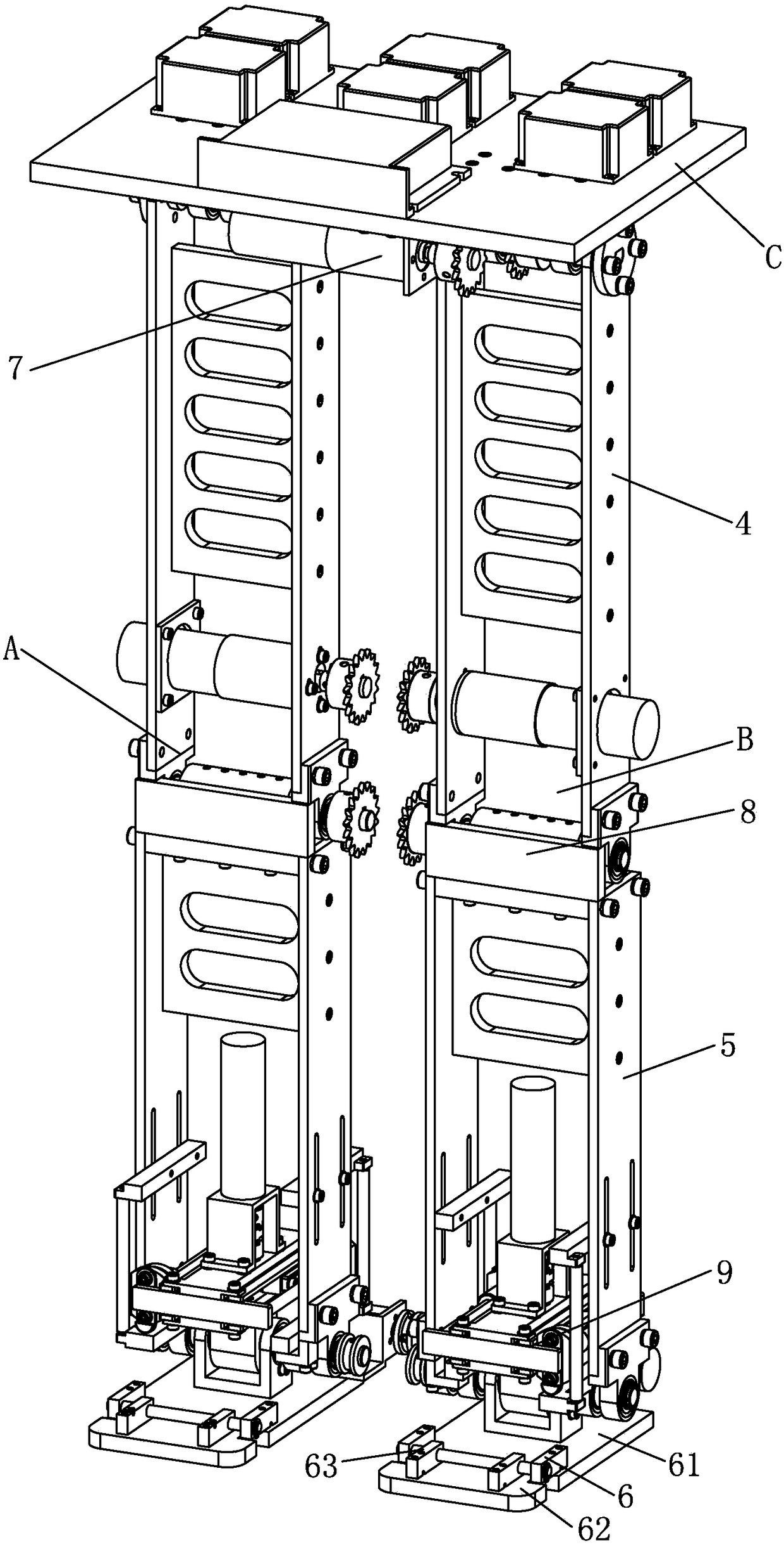
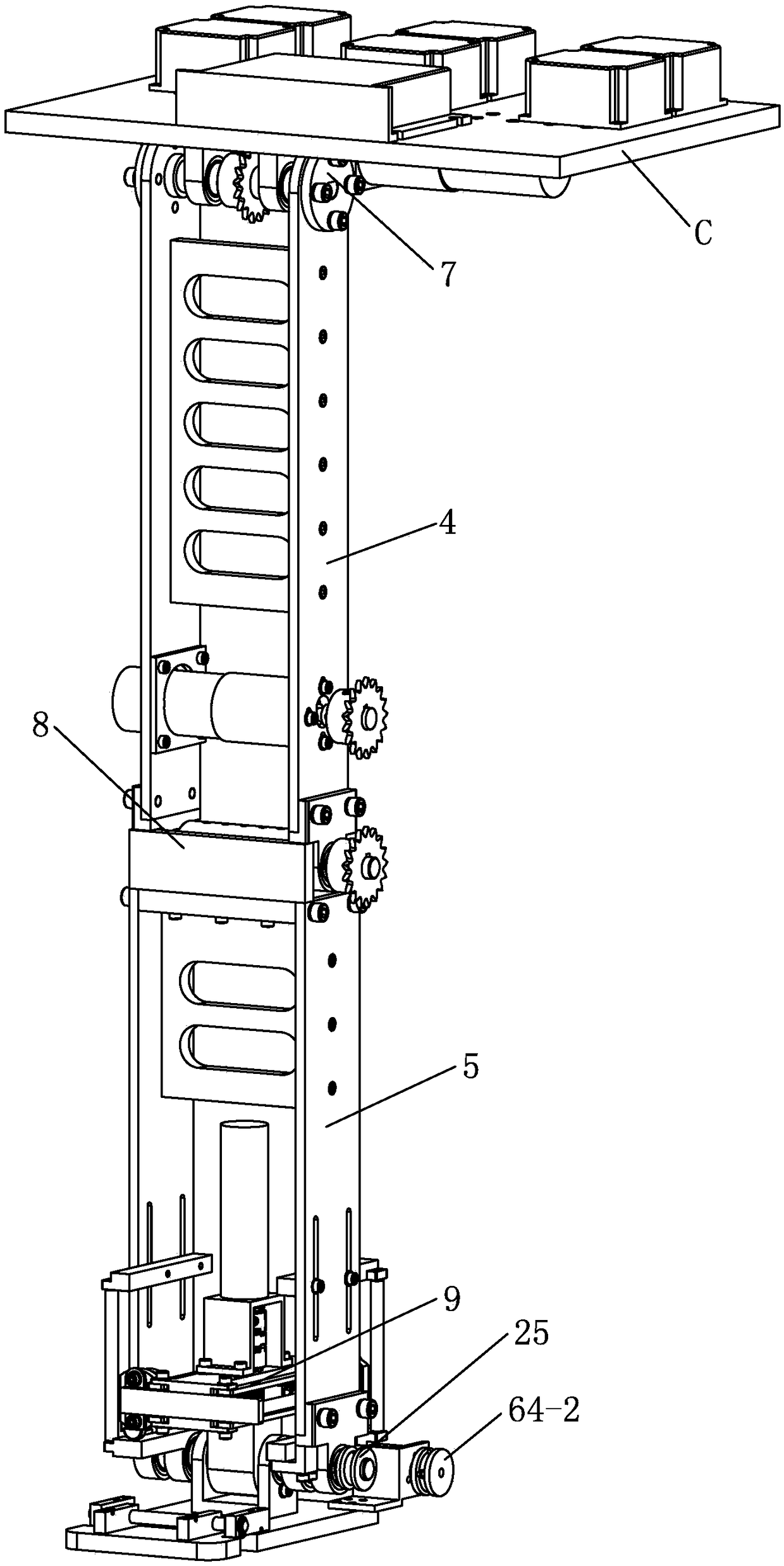
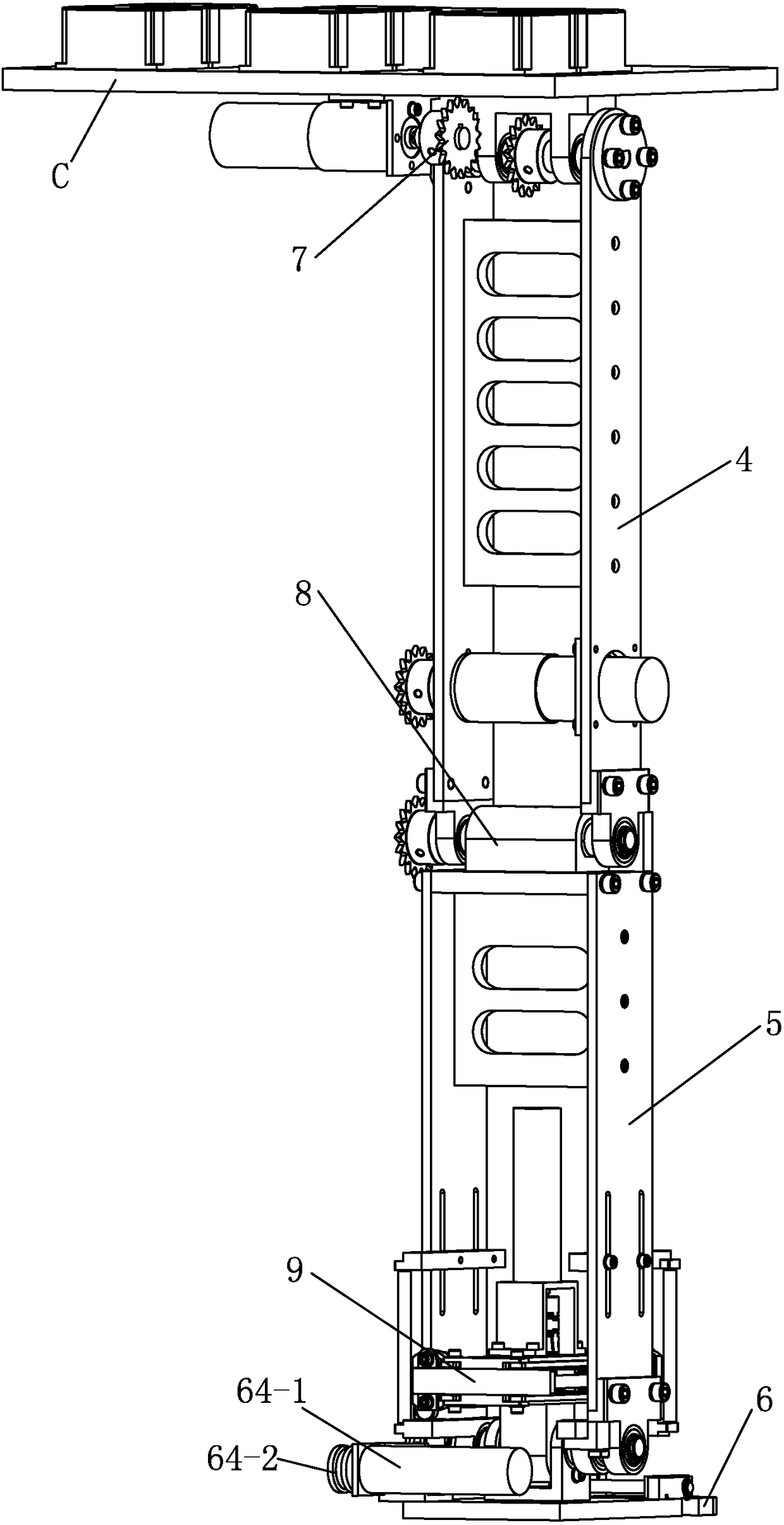
[0023] combine Figure 1-Figure 10 Explain that a biped robot with flexible ankle joints includes left leg A, right leg B and pelvis C; left leg A and right leg B respectively include thigh 4, calf 5, foot 6, hip joint 7, knee joint 8 and ankle joint 9; the left leg A and right leg B are connected through the pelvis C, the pelvis C is rotationally connected with the thigh 4 through the hip joint 7, the thigh 4 is rotationally connected with the lower leg 5 through the knee joint C, and the lower leg 5 is connected with the foot through the ankle joint 9 Part 6 is rotationally connected;
[0024] Each described hip joint 7 comprises hip joint motor 71, No. 1 hip joint sprocket wheel 72, No. 2 hip joint sprocket wheel 73, hip joint chain and hip joint drive shaft 74; The axial horizontal arrangement ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More