

Variable rigidity flexible driver for exoskeleton type lower limb rehabilitation robot
A rehabilitation robot and flexible driver technology, applied in the direction of passive exercise equipment, manipulators, program-controlled manipulators, etc., can solve the problems of poor cushioning, body damage, large impact force, etc., and achieve the effect of low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
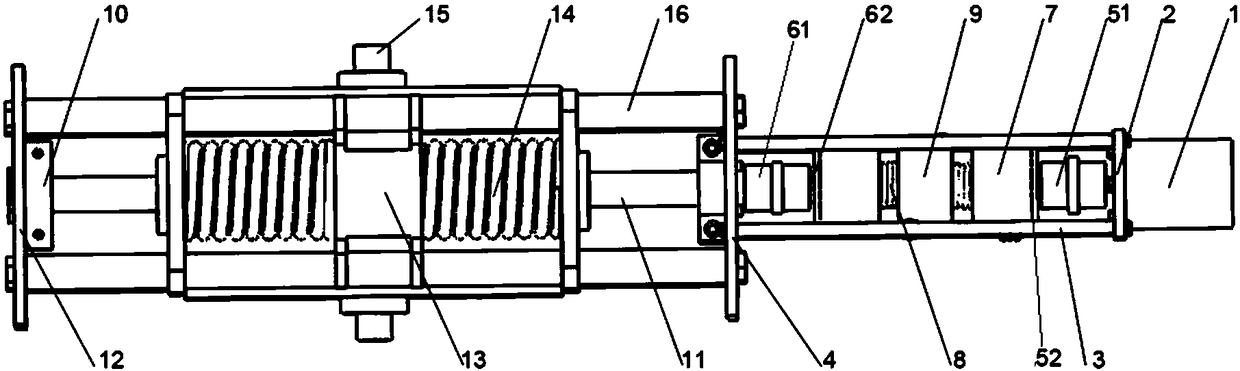
[0027] A variable-stiffness flexible driver for an exoskeleton-type lower limb rehabilitation robot, the driver comprising:
[0028] Bracket: including screw support base installation bottom plate 12, screw support base installation top plate 4 and motor installation plate 2 arranged in parallel in sequence, screw support base installation bottom plate 12 and screw support base installation top plate 4 are fixed by execution guide rail 16 Connection, the screw support seat installation top plate 4 and the motor installation plate 2 are fixedly connected through the guide roller 3;
[0029] Drive motor 1: fixedly installed on the motor mounting plate 2, and the drive motor 1 and the motor mounting plate 2 are fixed with a bolt group;
[0030] Executing unit: including the screw rod 11 arranged between the bottom plate 12 of the screw support base and the top plate 4 of the screw support base, the screw nut 13 connected to the screw rod 11, and the top and bottom ends of the scr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More