Way-finding method for ground cleaning robot
A sweeping robot and map technology, applied in the direction of instruments, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of low efficiency, low cleaning coverage of sweeping robots, and unclear maps of cleaned areas And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention is applied to the existing path-planning floor sweeping robot. An edge infrared detector is added to the floor sweeping robot to detect the edge, find the way along the edge, and determine the layout map of the entire cleaned area.
[0017] The invention provides a pathfinding method for a sweeping robot.
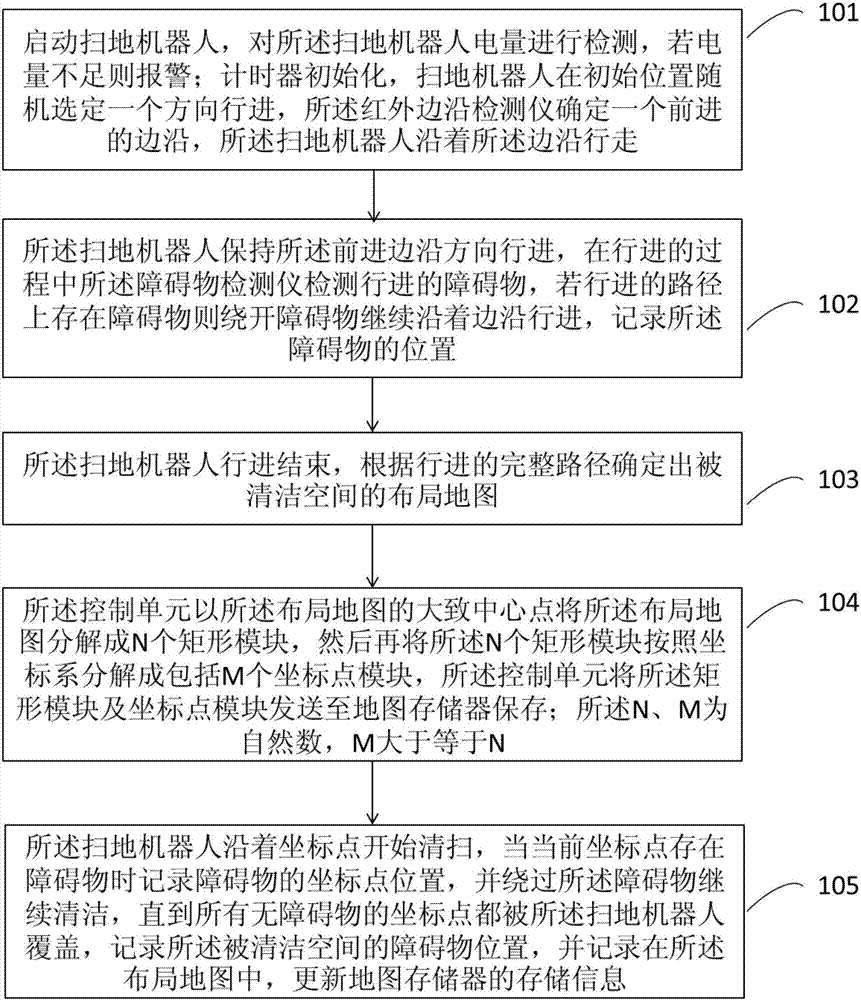
[0018] The sweeping robot includes a control unit, a timer, an infrared edge detector, a map memory, and an obstacle detector. The control unit receives and saves the obstacle detection information output by the obstacle detector, and controls the direction of travel of the sweeping robot. The method comprises the steps of:
[0019] Step 1: Start the sweeping robot, detect the power of the sweeping robot, and alarm if the power is insufficient; the timer is initialized, the sweeping robot randomly selects a direction at the initial position, and the infrared edge detector determines an advancing edge, The sweeping robot walks along the edge;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More