

A leader-follower proportional consensus control method for second-order multi-agent systems
A multi-agent system and multi-agent technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of proportional consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
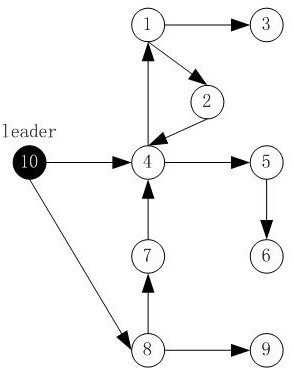
[0040] The specific embodiment of the present invention is as Figure 4 shown. In this embodiment, a leader-follower proportional consistency control method for a second-order multi-agent system includes the following steps:
[0041] (1) Determine the directed spanning tree structure with the leader as the root node;
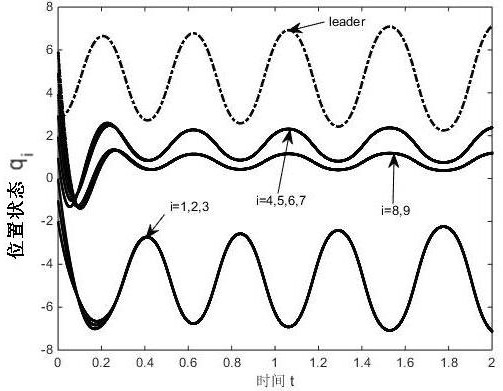
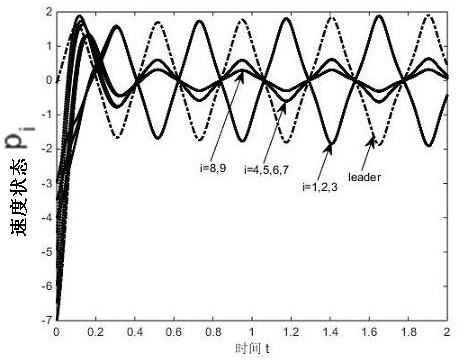
[0042] (2) Set the proportional parameters for the follower agent in advance, so that the multi-agent state can achieve the desired proportional relationship;
[0043] (3) Design a leader-follower proportional consensus protocol for the individual following agent, so that the state of the following agent can achieve proportional consistency.
[0044] The main research conclusion of the consensus problem of multi-agents is that some key information of all agents in the same topological network is consistent. However, in collaborative control, in the presence of different task assignments and physical variables, in order to complete the collaborative task, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More