Intelligent collision avoidance system and method for ships based on maneuverability modeling
A maneuverability and ship technology, applied in collision avoidance and other directions, can solve the problems of prone to marine traffic accidents, poor feasibility, saturation of actuators, etc., to achieve the effect of safe and autonomous navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
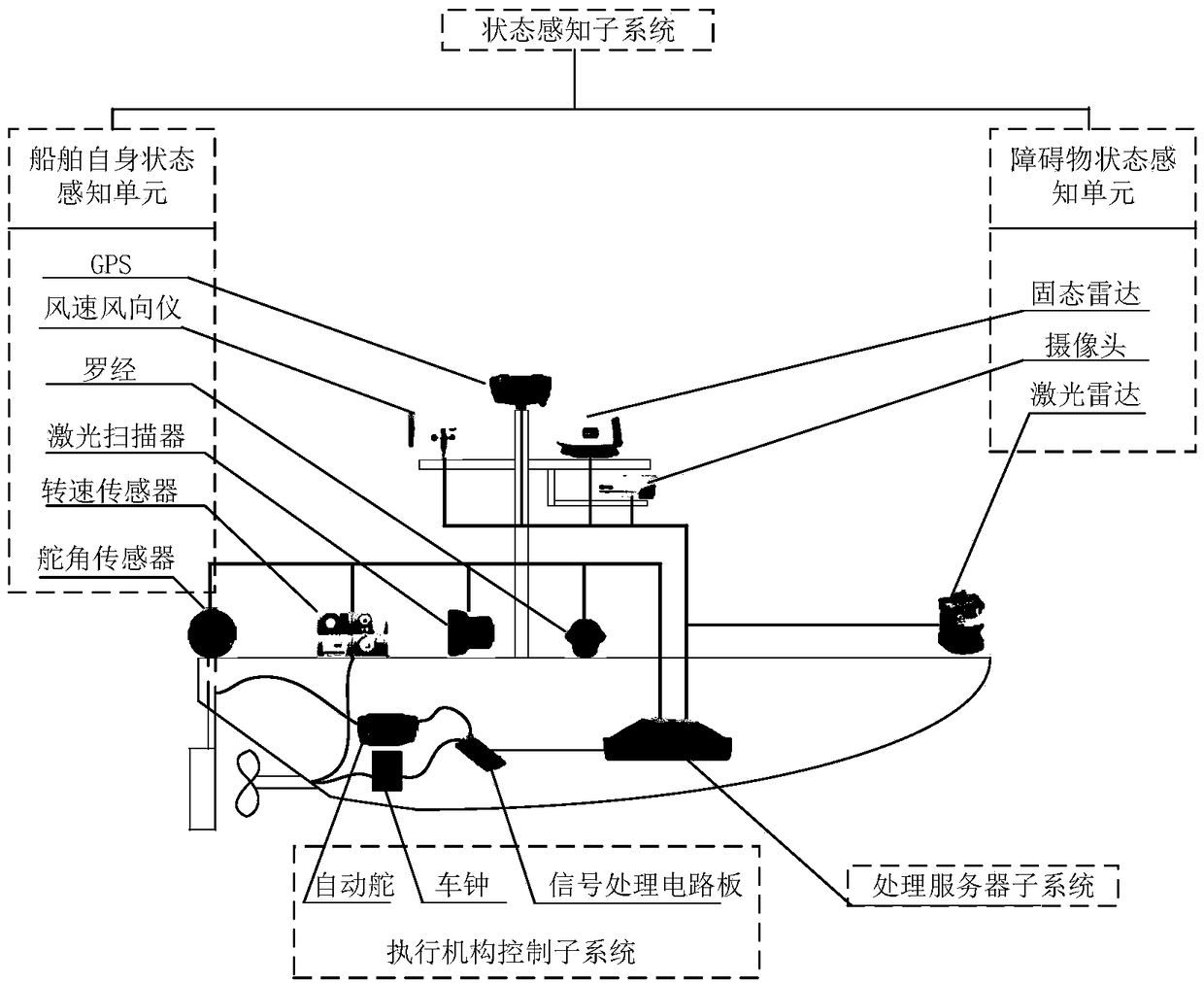
[0040] The present invention provides a ship intelligent collision avoidance system based on maneuverability modeling, such as figure 1 As shown, it includes:
[0041]The state perception subsystem installed at the end of the ship includes the ship's own state perception unit and the obstacle state perception unit. The ship's own state perception unit is used to obtain the state parameters of the ship itself, and the obstacle state perception unit is used to obtain obstacles within the detection range. location information. The ship's own state perception unit includes GPS for obtaining ship position information, a compass for obtaining ship attitude information, a laser scanner for obtaining ship draft, a speed sensor for obtaining the current main shaft speed of the ship, and a Angle sensor for current rudder angle. The obstacle state perception ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More