

A joint robustness testing system for humanoid robot
A humanoid robot, robustness testing technology, applied in the field of humanoid robot joint robustness test system, can solve the problems of single loading direction and difficult quantitative analysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
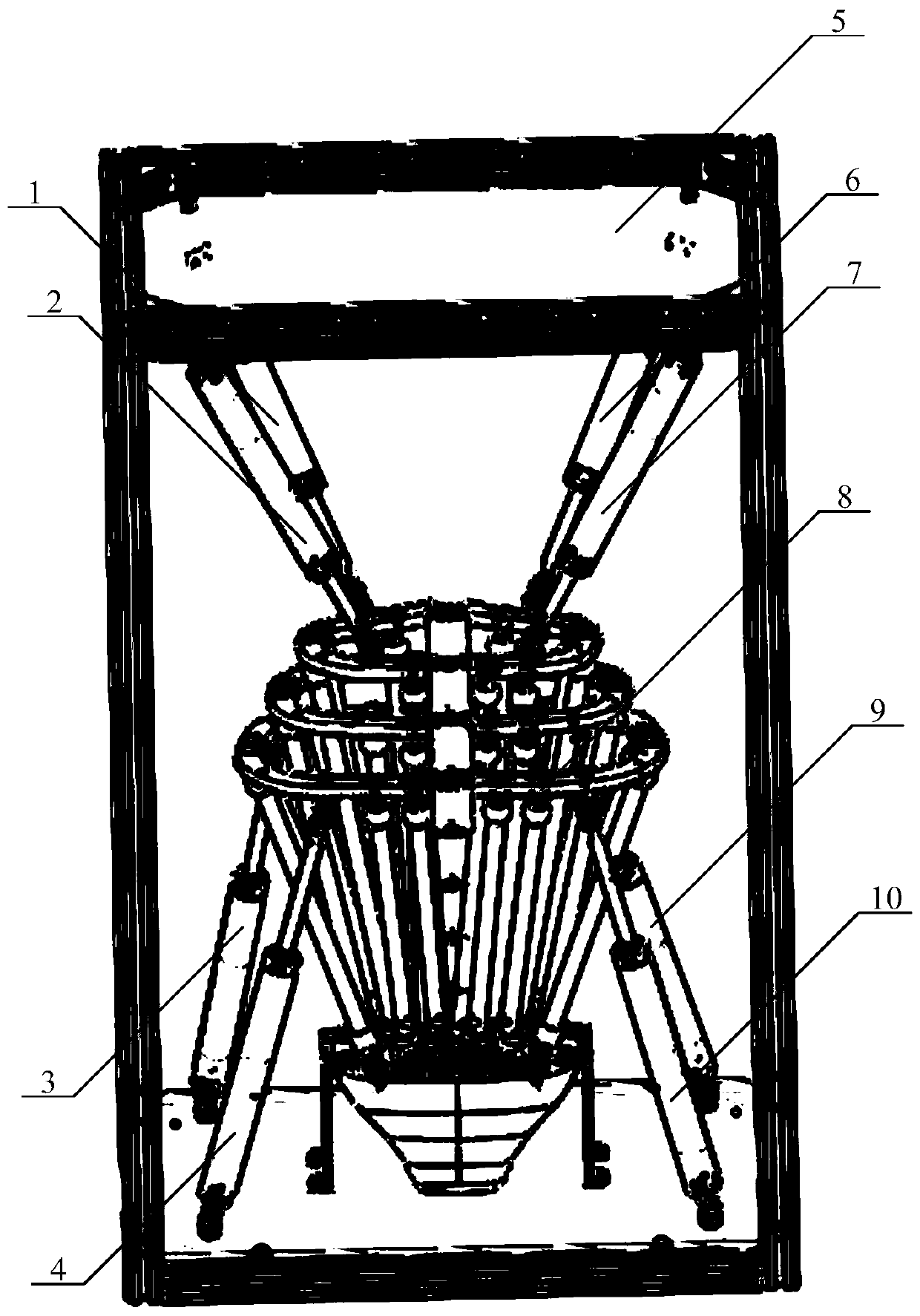
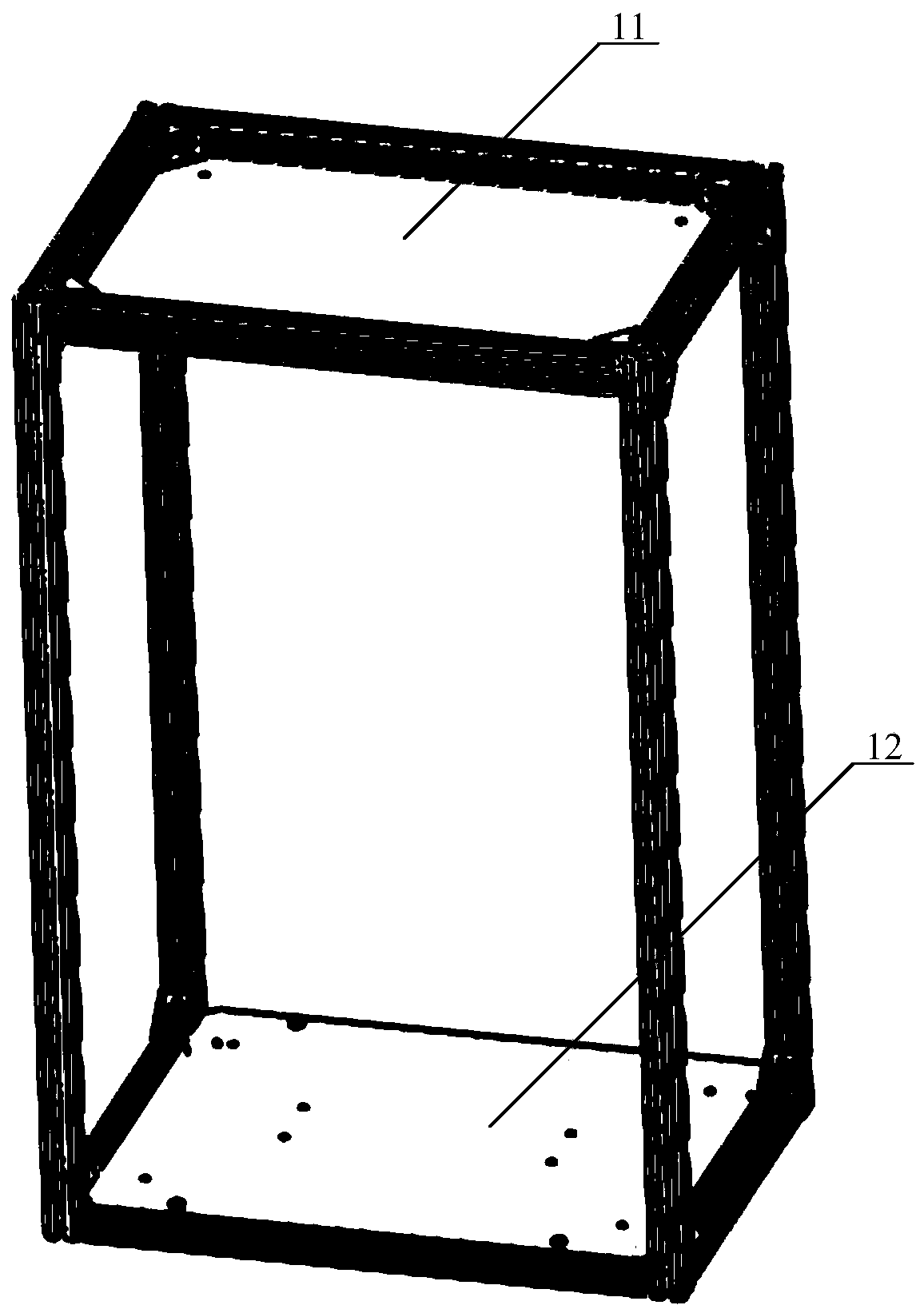
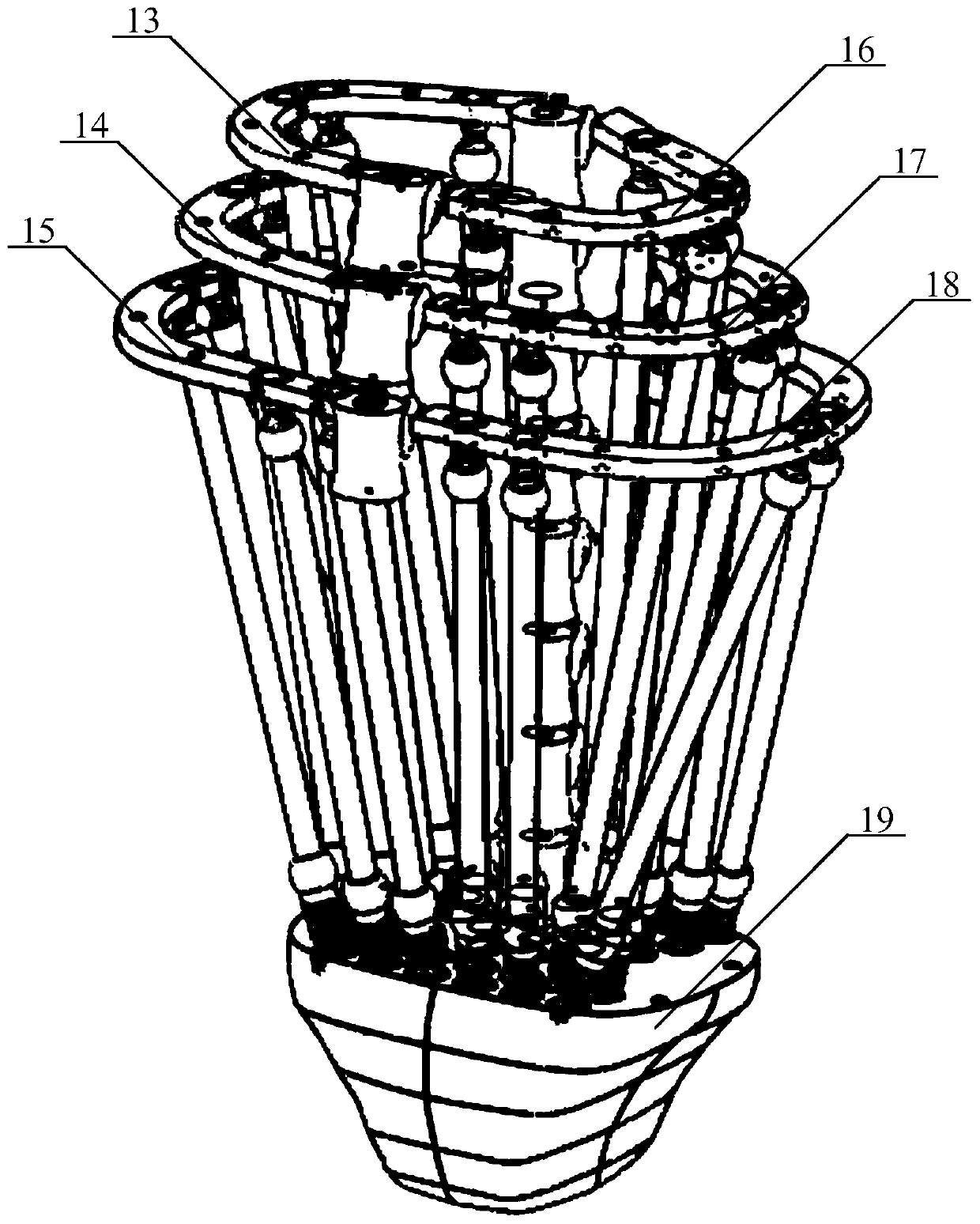
[0020] Such as figure 1 , 2, 3, 4, and 5, the humanoid lumbar joint 8 tested in this embodiment includes: a first rib 13, a second rib 14, a third rib 15, a fourth rib 16, a fifth rib 17, and a sixth rib 18. Pelvis19. The humanoid robot joint robustness testing system of the present invention comprises: a first cylinder 1, a second cylinder 2, a third cylinder 3, a fourth cylinder 4, a support 5, a fifth cylinder 6, a sixth cylinder 7, and a seventh cylinder 9 , the eighth cylinder 10, the upper panel 11, the lower panel 12, the first connector 20, the second connector 21, the third connector 22, the fourth connector 23, the pneumatic triplet 24, the first gas tank 25, the first One pneumatic proportional pressure valve 26, the second pneumatic proportional pressure valve 27, the third pneumatic proportional pressure valve 28, the fourth pneumatic proportional pressure valve 29, the fifth pneumatic proportional pressure valve 30, the sixth pneumatic proportional pressure val...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More