

A Forearm Adaptive Mechanism for Centrally Driven Upper Limb Rehabilitation Robot
A rehabilitation robot, central drive technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of low usage rate of the forearm part, difficult to meet the requirements of research, unable to meet the slight rotation of the forearm, etc., to improve comfort. , the effect of improving the acceptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following describes several preferred embodiments of the present invention with reference to the accompanying drawings to make the technical content clearer and easier to understand. The present invention can be embodied in many different forms of embodiments, and the protection scope of the present invention is not limited to the embodiments mentioned herein.
[0028] In the drawings, components with the same structure are denoted by the same numerals, and components with similar structures or functions are denoted by similar numerals. The size and thickness of each component shown in the drawings are shown arbitrarily, and the present invention does not limit the size and thickness of each component. In order to make the illustration clearer, the thickness of parts is appropriately exaggerated in some places in the drawings.
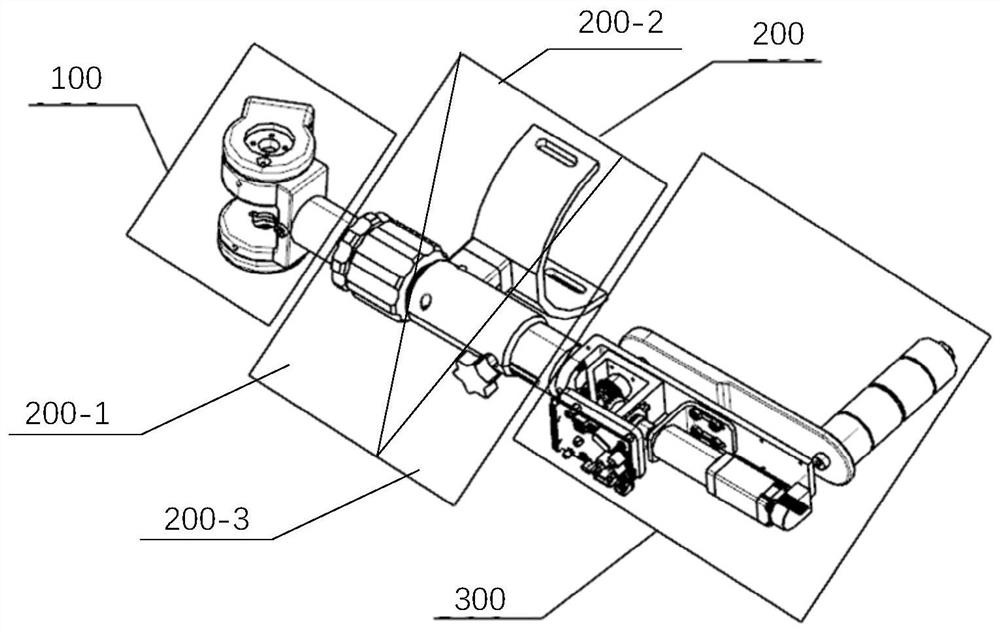
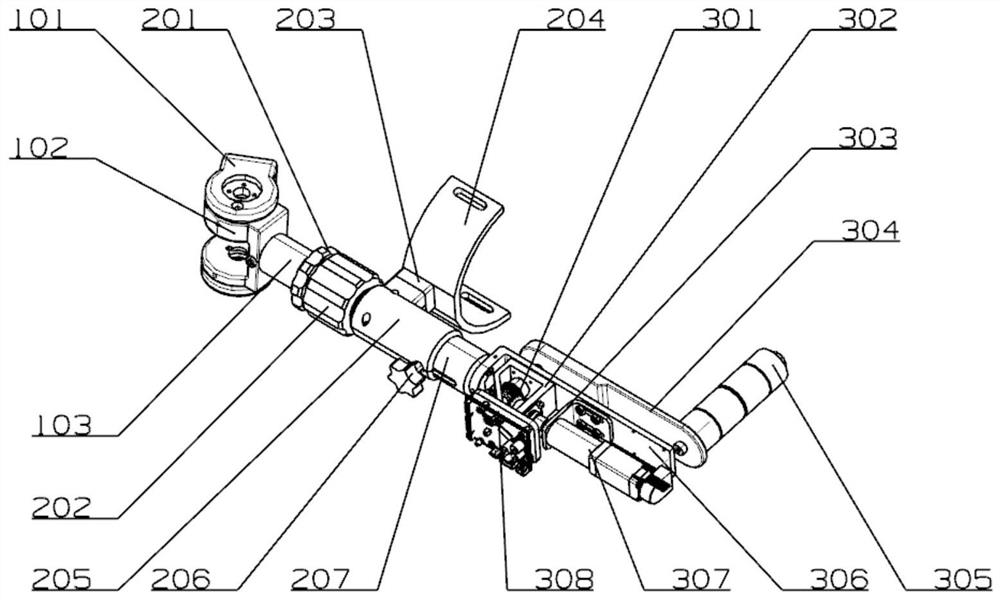
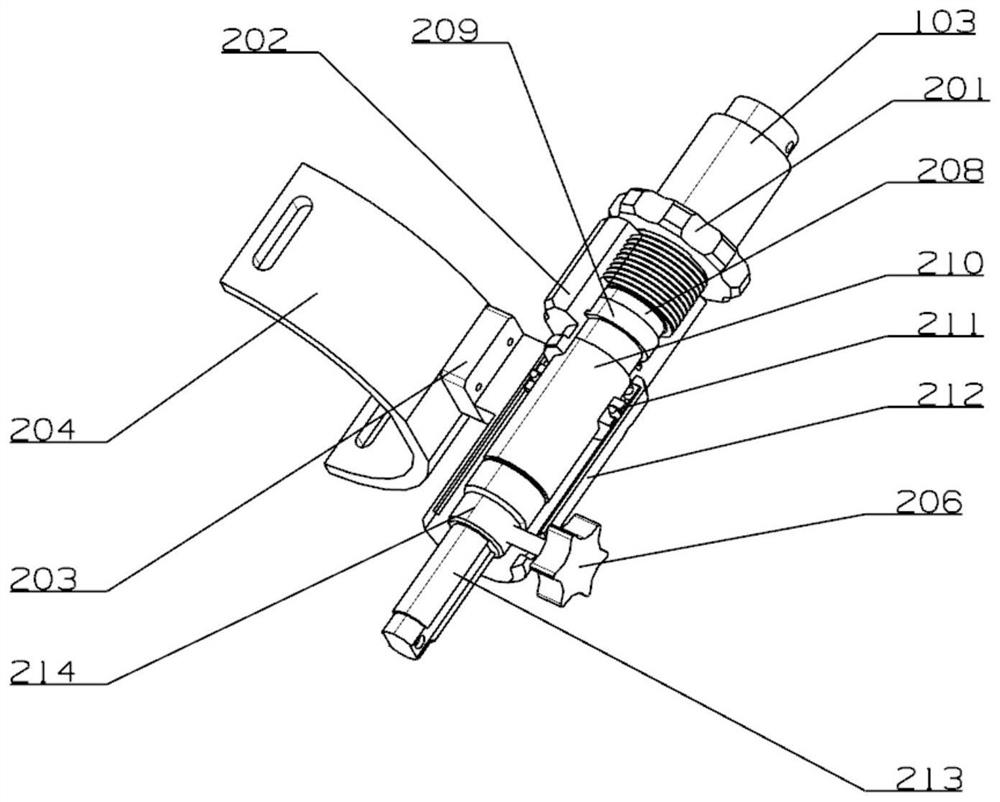
[0029] This embodiment discloses a forearm adaptive mechanism for a centrally driven upper limb rehabilitation robot, such as figure 1 As...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More