

Intelligent vehicle emergency collision avoidance control method
A control method and smart car technology, applied in the field of automotive active safety, can solve problems such as not considering the impact of vehicles in adjacent lanes, and achieve the effect of solving emergency collision avoidance problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
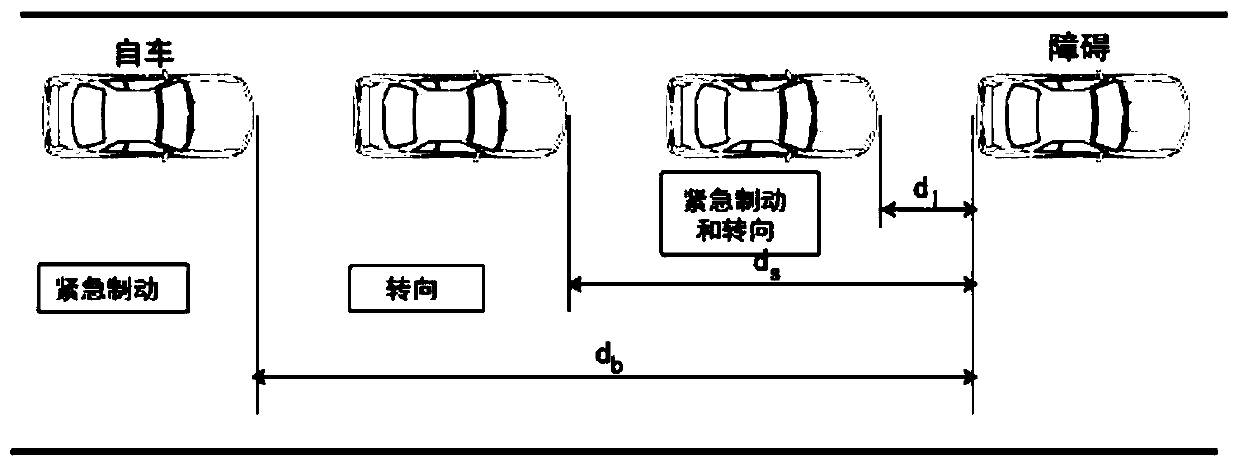
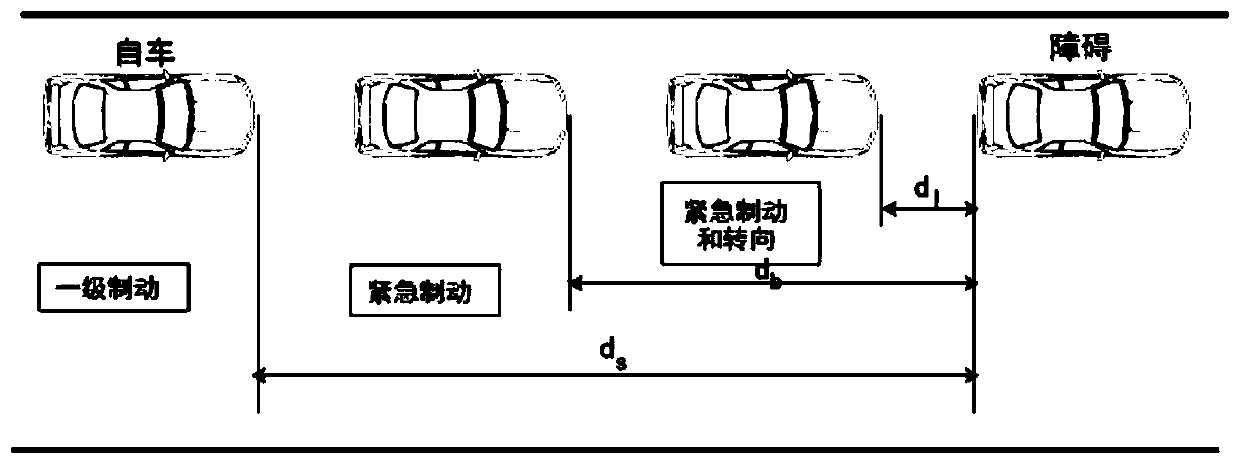
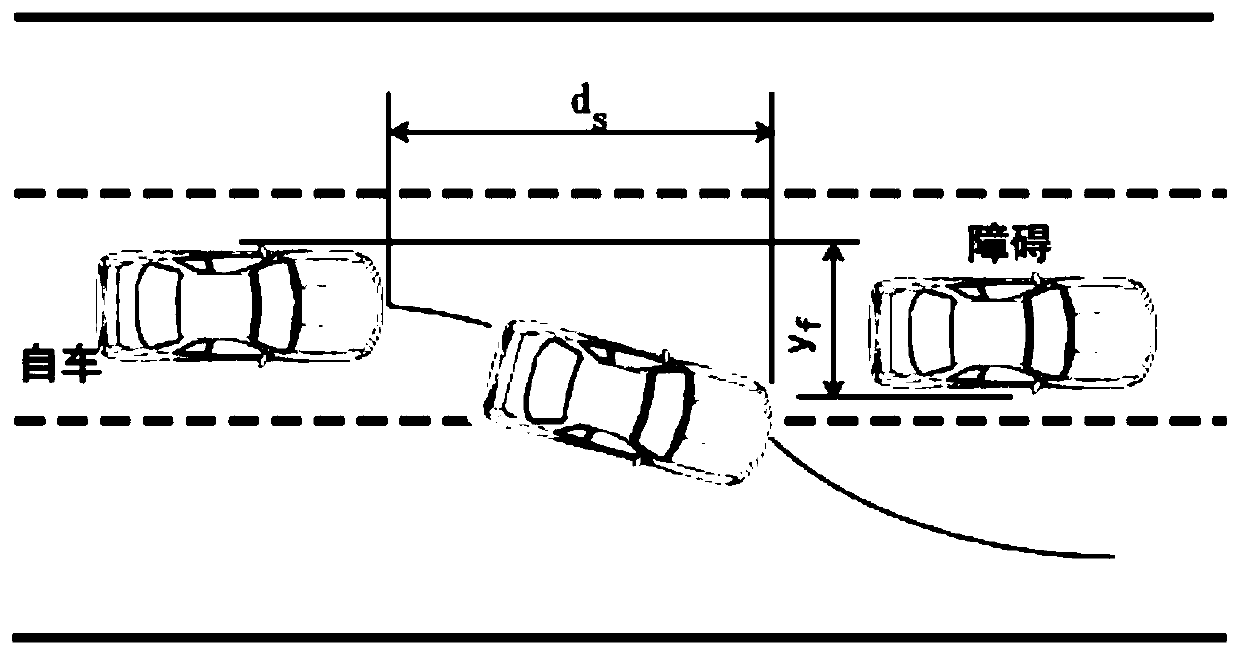
[0035] Assume that during the collision avoidance process, the longitudinal and lateral motions of the ego vehicle are relatively independent. According to the different distances from the obstacles in front and the real-time road conditions of the adjacent lanes, the collision avoidance modes can be divided into four situations: braking control collision avoidance, steering control collision avoidance, brake steering coordinated control collision avoidance, and failure to avoid collision. A proposed smart car emergency collision avoidance control method includes the following steps:
[0036] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More