

Method and device for adjusting speed of virtual passive walking robot, and storage medium terminal
A walking robot and walking speed technology, applied in control/regulation systems, speed/acceleration control, instruments, etc., can solve the problems of poor stability of virtual passive walking and difficulty in adjusting walking speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] In order to solve the technical problems existing in the prior art, an embodiment of the present invention provides a speed adjustment method of a virtual passive walking robot.
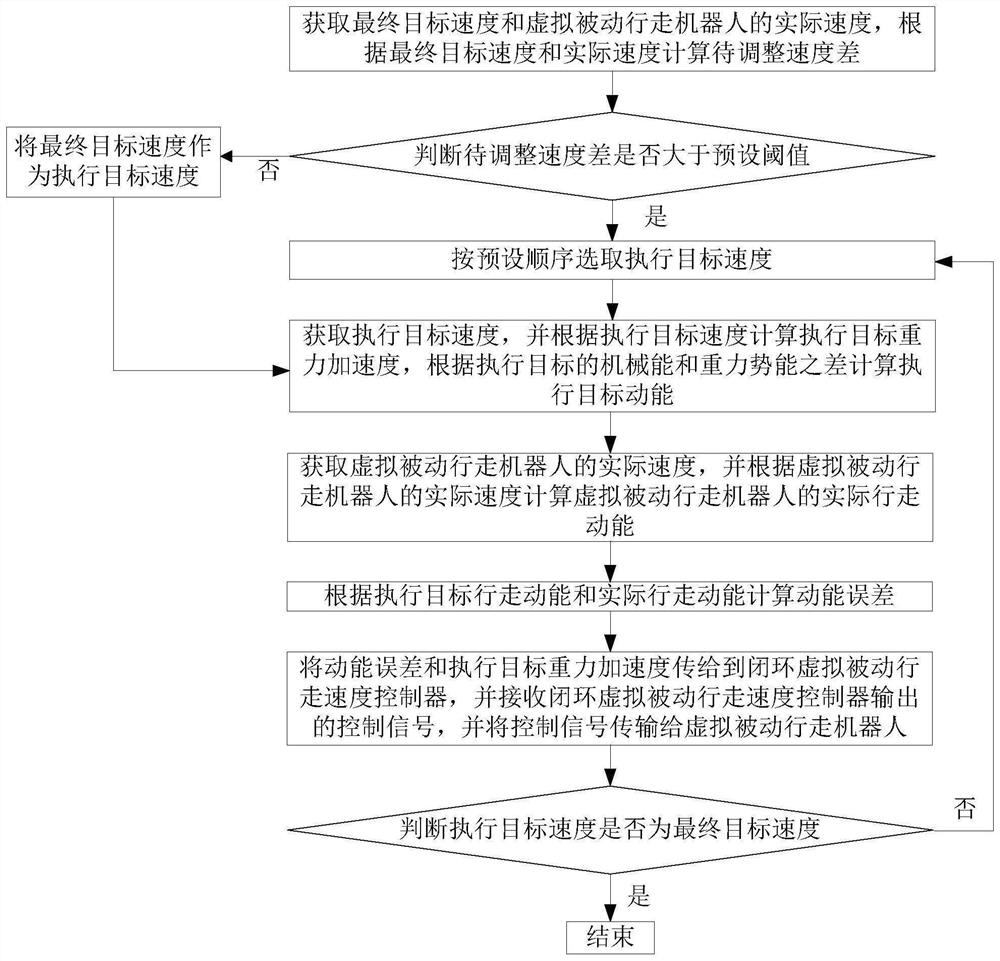
[0059] figure 1 A schematic diagram showing the process of a method for adjusting the speed of a virtual passive walking robot according to an embodiment of the present invention; figure 1 As shown, the speed adjustment method of the virtual passive walking robot in the embodiment of the present invention includes performing the speed adjustment process in a preset manner, and performing the speed adjustment process in a preset manner specifically includes the following steps.
[0060] Step S101, obtaining the final target speed and the actual speed of the virtual passive walking robot, and calculating the speed difference to be adjusted according to the final target speed and the actual speed.
[0061] Specifically, the final target speed of the virtual passive walking robot for speed adjust...
Embodiment 2
[0142] In order to solve the technical problems existing in the prior art, an embodiment of the present invention provides a speed adjustment device for a virtual passive walking robot.
[0143] Figure 11 A schematic structural diagram of a speed regulating device of a virtual passive walking robot in Embodiment 2 of the present invention is shown; refer to Figure 11 As shown, the speed adjustment device of the virtual passive walking robot in the embodiment of the present invention includes an execution target gravitational acceleration and walking kinetic energy calculation module, an actual walking kinetic energy calculation module, a kinetic energy error calculation module and a speed adjustment module connected in sequence.
[0144] The execution target gravitational acceleration and walking kinetic energy calculation module is used to obtain the execution target speed, and calculate the execution target gravity acceleration and the execution target walking kinetic ener...
Embodiment 3
[0150] In order to solve the above-mentioned technical problems existing in the prior art, the embodiment of the present invention also provides a storage medium, which stores a computer program, and when the computer program is executed by the processor, the speed of the virtual passive walking robot in the first embodiment can be achieved. All steps in the conditioning method.
[0151] The specific steps of the method for adjusting the speed of the virtual passive walking robot and the beneficial effects obtained by applying the readable storage medium provided by the embodiment of the present invention are the same as those of the first embodiment, and will not be repeated here.
[0152] It should be noted that the storage medium includes various media capable of storing program codes such as ROM, RAM, magnetic disk or optical disk.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More