

Inertial reference space-time accurate alignment method of optical navigation sensor
An optical navigation and precise alignment technology, applied in the direction of instruments, measuring devices, etc., can solve the problems of impossible to obtain accurate star sensors and optical navigation sensor installation matrix
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0031] The present invention will be further elaborated below in conjunction with embodiment.
[0032] The invention provides an inertial reference space-time precise alignment method of an optical navigation sensor to avoid attitude and navigation errors caused by external environmental factors and exposure time differences.
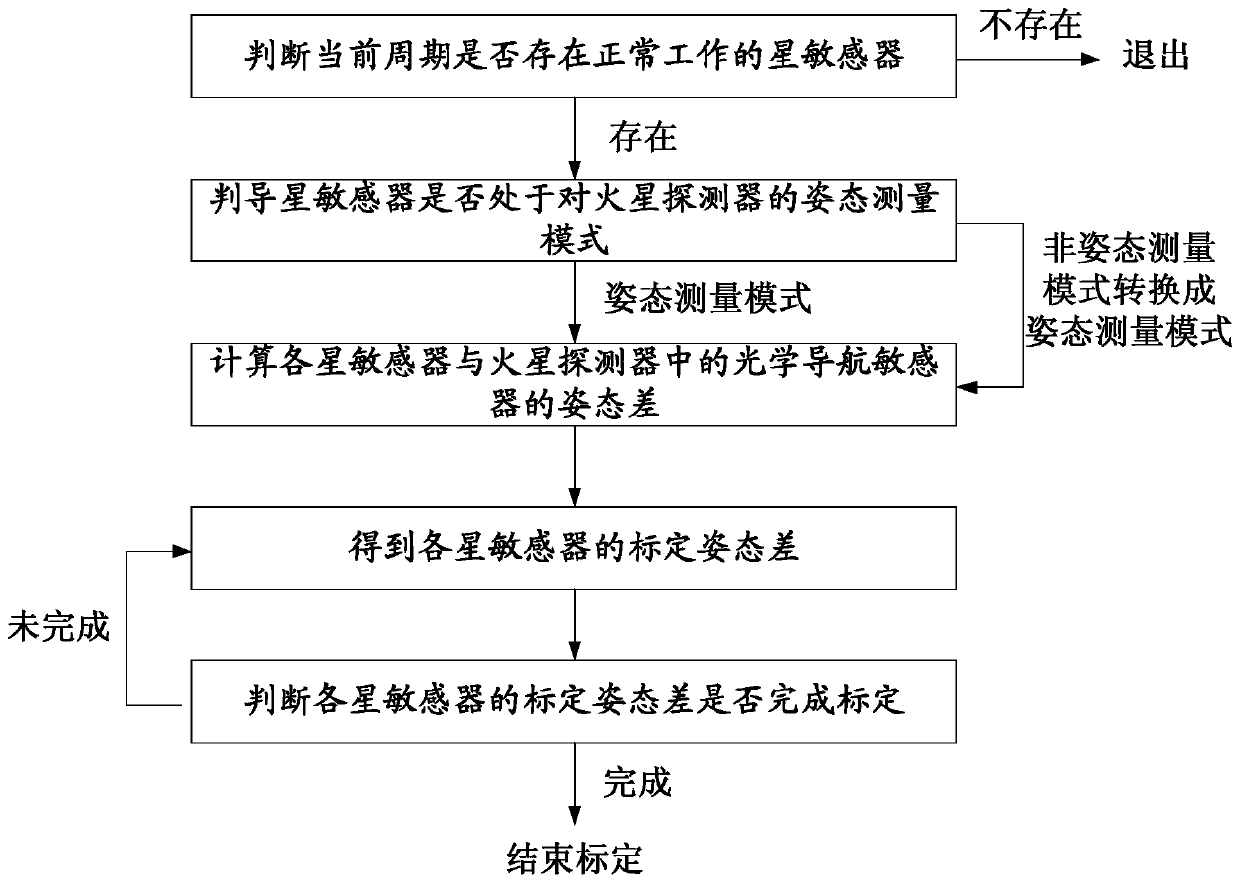
[0033] Such as figure 1 As shown, the inertial reference space-time precise alignment method mainly includes the following steps:
[0034] Step 1. Start the calibration process, and judge whether there is a normal working star sensor in the current period T; when there is a normal working star sensor, enter step 2; otherwise, exit the calibration process; the method for judging whether the star sensor is working normally is: When the star sensitivity reference modulus of the star sensor is 0.9-1.1, the star sensor is considered to be working normally; otherwise, the star sensor is considered to be working abnormally.
[0035] Step 2. Determine whether...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More