Magnetic control robot interaction distance monitoring device and method
A monitoring device and robot technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems such as injuries, magnetically controlled robots cannot be effectively driven, and excessive contact pressure in the contact environment, so as to reduce the risk of contact pressure. , avoid injury, improve efficiency and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
[0042] In this implementation, unless otherwise specified, the distance refers to the relative distance between the driving magnet and the magnetron robot.
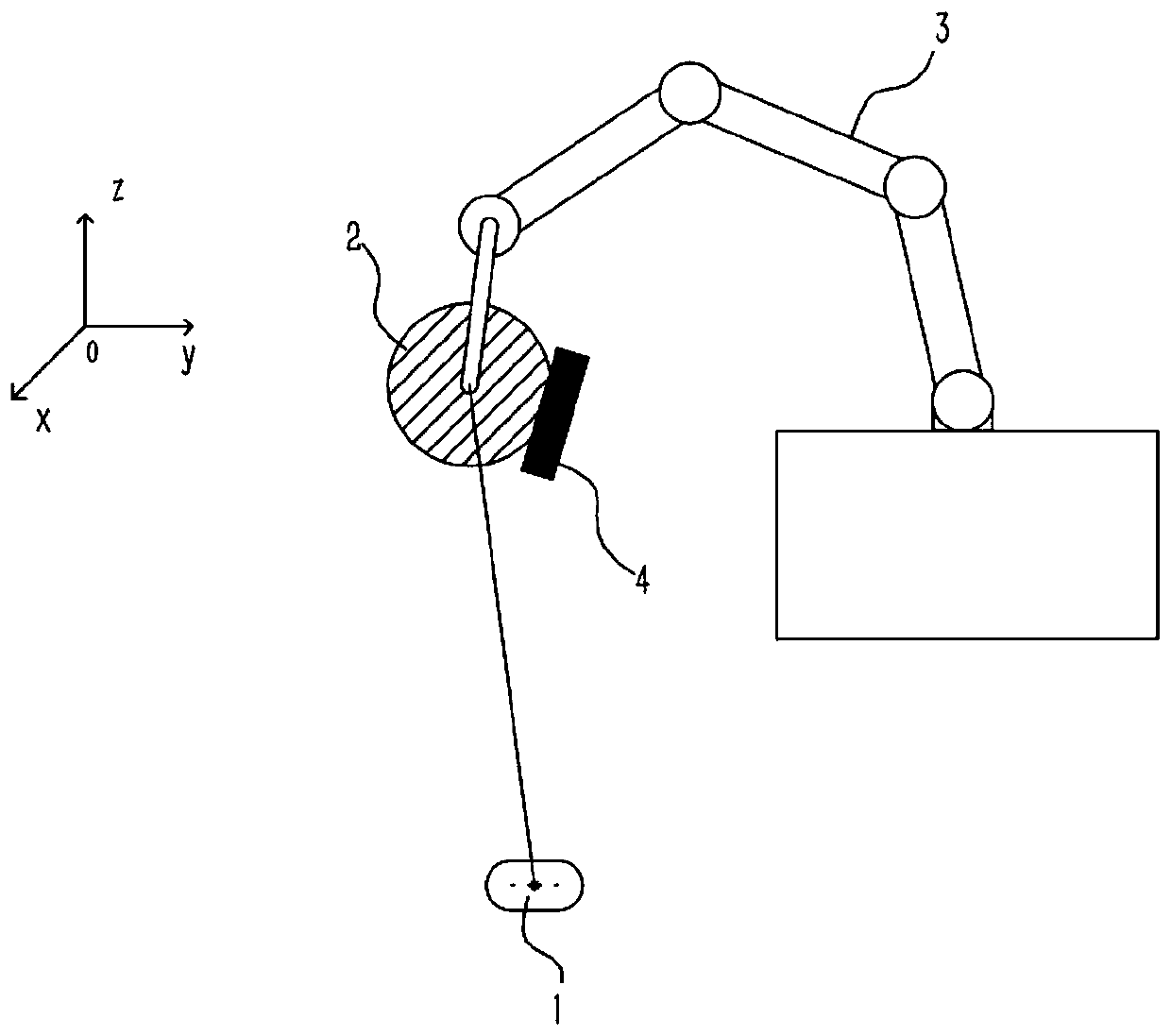
[0043] This embodiment provides a magnetically controlled robot interactive distance monitoring device, such as figure 1 As shown, it includes a magnetically controlled robot 1, a driving magnet 2, a driving magnet guiding module 3, a magnetic field information detection module 4 and a control module, wherein the control module is not shown in the drawings. Wherein, the driving magnet 2 is installed at the end of the driving magnet guiding module 3, and is used to provide the motion of multiple degrees of...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap