A multi-fault detection method for unmanned bee colony cooperative navigation
A technology of collaborative navigation and detection method, applied in the field of navigation, can solve the problems of diagnosis failure, erroneous diagnosis, multiple fault detection sensitivity decline, etc., to achieve the effects of good adaptability, reliability, and wide applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described in detail below in conjunction with the accompanying drawings.
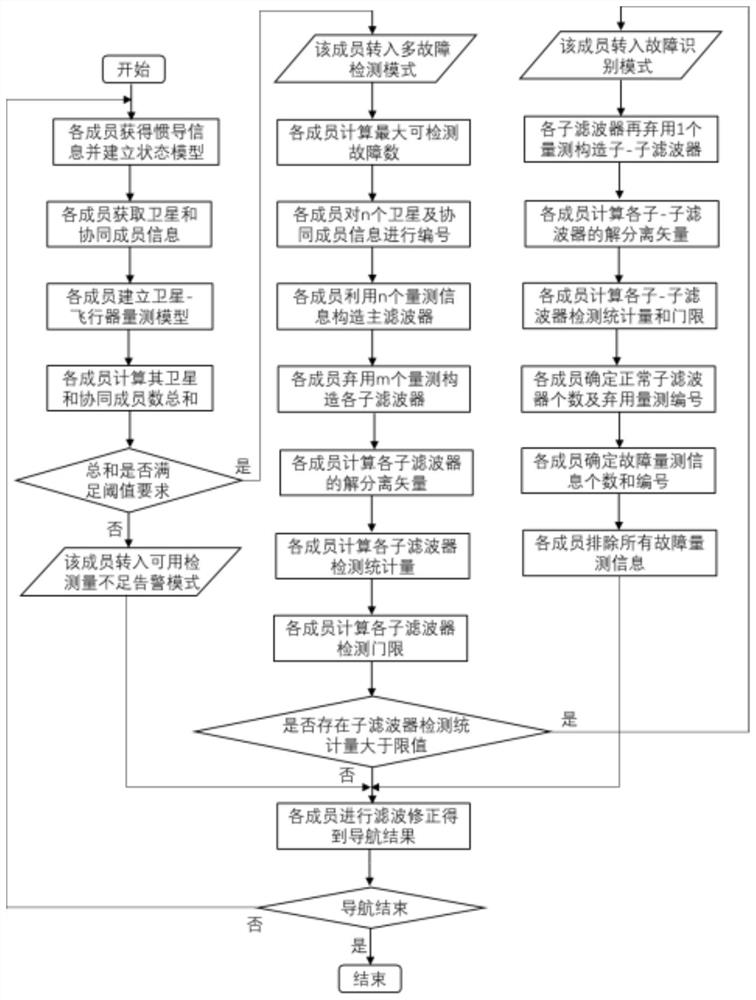
[0076]The invention provides a multi-fault detection method for unmanned bee colony cooperative navigation, which utilizes the unmanned bee colony cooperative information to assist in the multi-fault detection and identification of the unmanned aerial vehicle navigation system; The collaborative fault-tolerant architecture is designed for the navigation observation information, and a multi-level Kalman filter is constructed by using the combination of different measurement information, and the fault state of the UAV navigation satellite and the collaborative measurement information is detected by the difference of different filter solutions, and the fault is detected. Measurement isolation to realize fault-tolerant reconstruction of UAV collaborative navigation system. like figure 1 shown, the specific steps are as follows:
[0077] Step (1): Let the curren...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More