

Permanent magnet synchronous motor sliding mode control method based on combined reaching law and storage medium
A technology of permanent magnet synchronous motor and control method, applied in the direction of motor generator control, electronic commutation motor control, control system, etc., can solve the problem of weakening the high-frequency jitter of the control signal, no torque control effect, and insignificant suppression effect, etc. problems, to achieve the effect of eliminating chattering phenomenon, strengthening anti-interference ability, strong stability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts shall fall within the protection scope of the present invention.
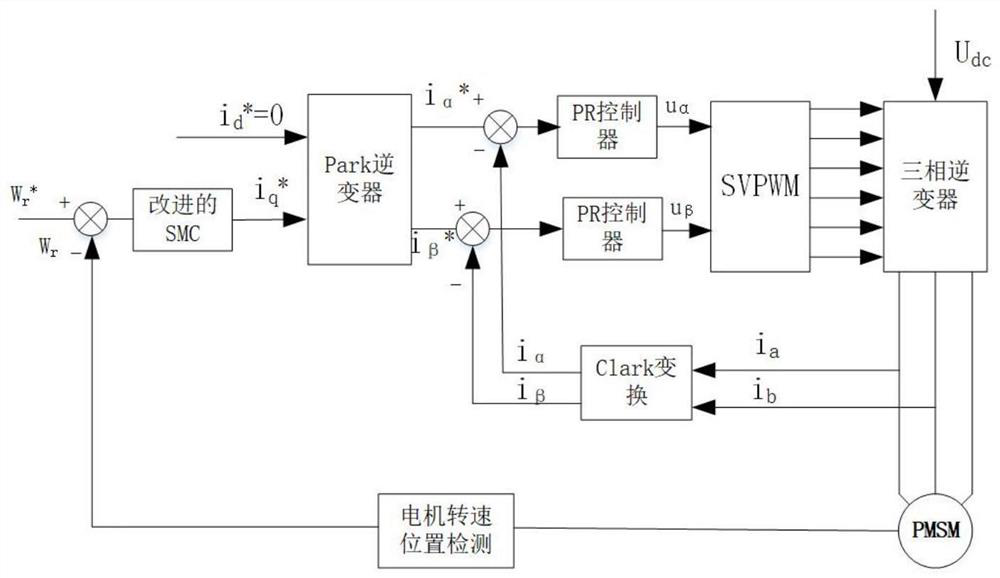
[0083] A sliding mode control method for permanent magnet synchronous motor based on combined reaching law, the control block diagram is as follows figure 1 shown, including:
[0084] Step 1: Use the photoelectric encoder to obtain the actual rotor angular velocity and rotor angle data of the permanent magnet synchronous motor;
[0085] Step 2: Establish the mathematical model of the permanent magnet synchronous motor in the three-phase stationary coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More