

Parallel crank guide rod self-rotating positioning mechanical arm
A technology of manipulators and guide rods, applied in the field of manipulators, can solve problems such as low positioning accuracy, complicated mechanism, and limited positioning methods, and achieve the effects of simple structure, reliable clamping, and low positioning dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention is described in more detail below in conjunction with accompanying drawing example:
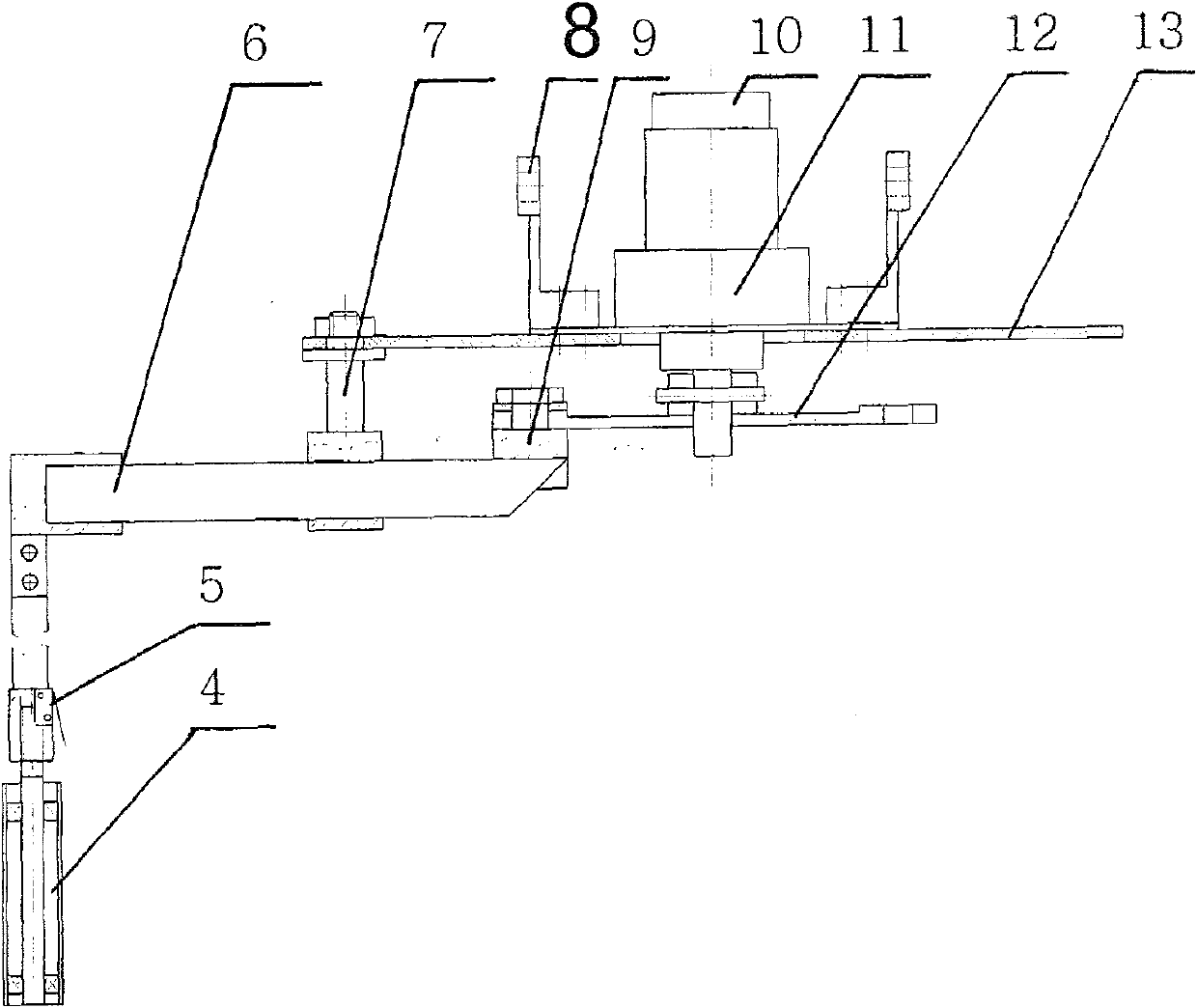
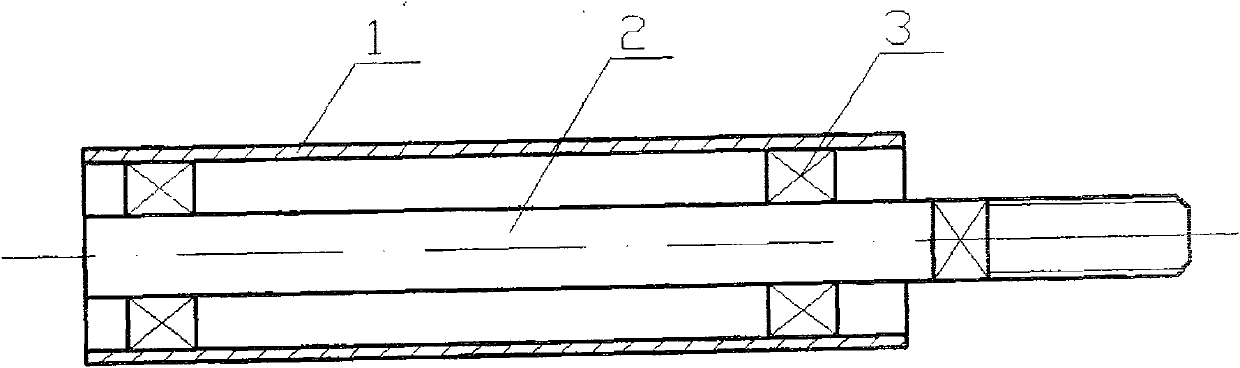
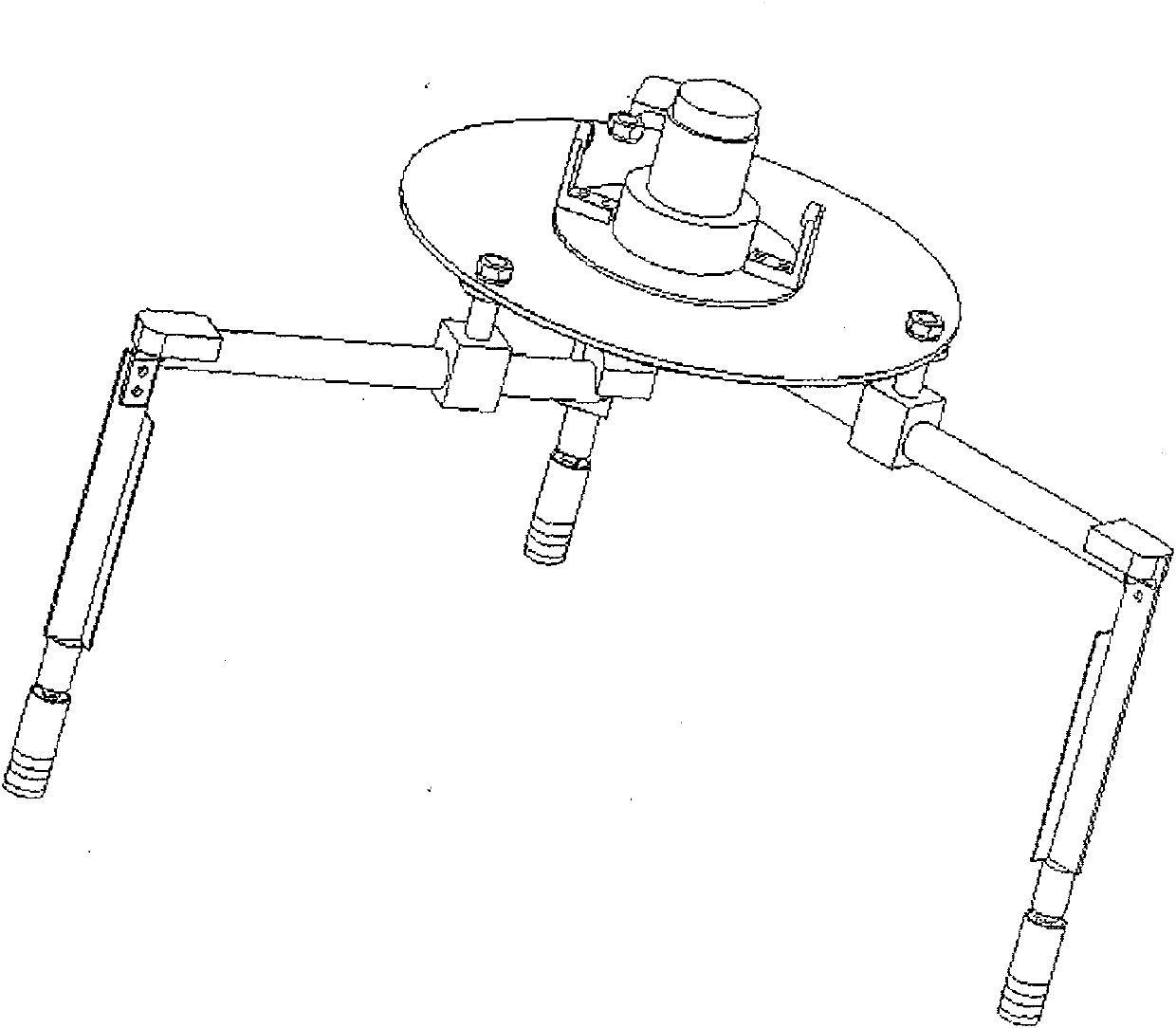
[0020] combine figure 1 , the parallel crank guide bar rotation positioning manipulator is composed of four parts: the interface frame, the drive positioning, the parallel crank guide bar clamping mechanism and the rotation positioning finger; the interface frame includes a fixed plate 13 and a manipulator interface mechanism 8 installed on the fixed plate The drive positioning part includes a motor 11 installed on the fixed disk, a motor code disc 10 installed at the rear of the motor, and a travel switch 5 installed on the end of the guide rod 6; the parallel guide rod clamping mechanism includes a guide rod 6, rotation movement Auxiliary 7, crank rotating pair 9 and the crank disc 12 that are connected on the motor output shaft, guide rod 6 is hinged with crank disc 12 by crank rotating pair 9, and rotation moving pair 7 is arranged between fixed disc 13 and gu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More