

Space three-translational parallel connection mechanism with far-rack single-lever
A three-translation and remote-frame technology, applied in the field of robotics, can solve the problems such as the difficulty of ensuring the posture of the end effector of the mechanism and the difficulty of control accuracy, and achieve the effect of easily identifying the source of geometric errors, simplifying the active branch chain, and reducing the manufacturing cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing:
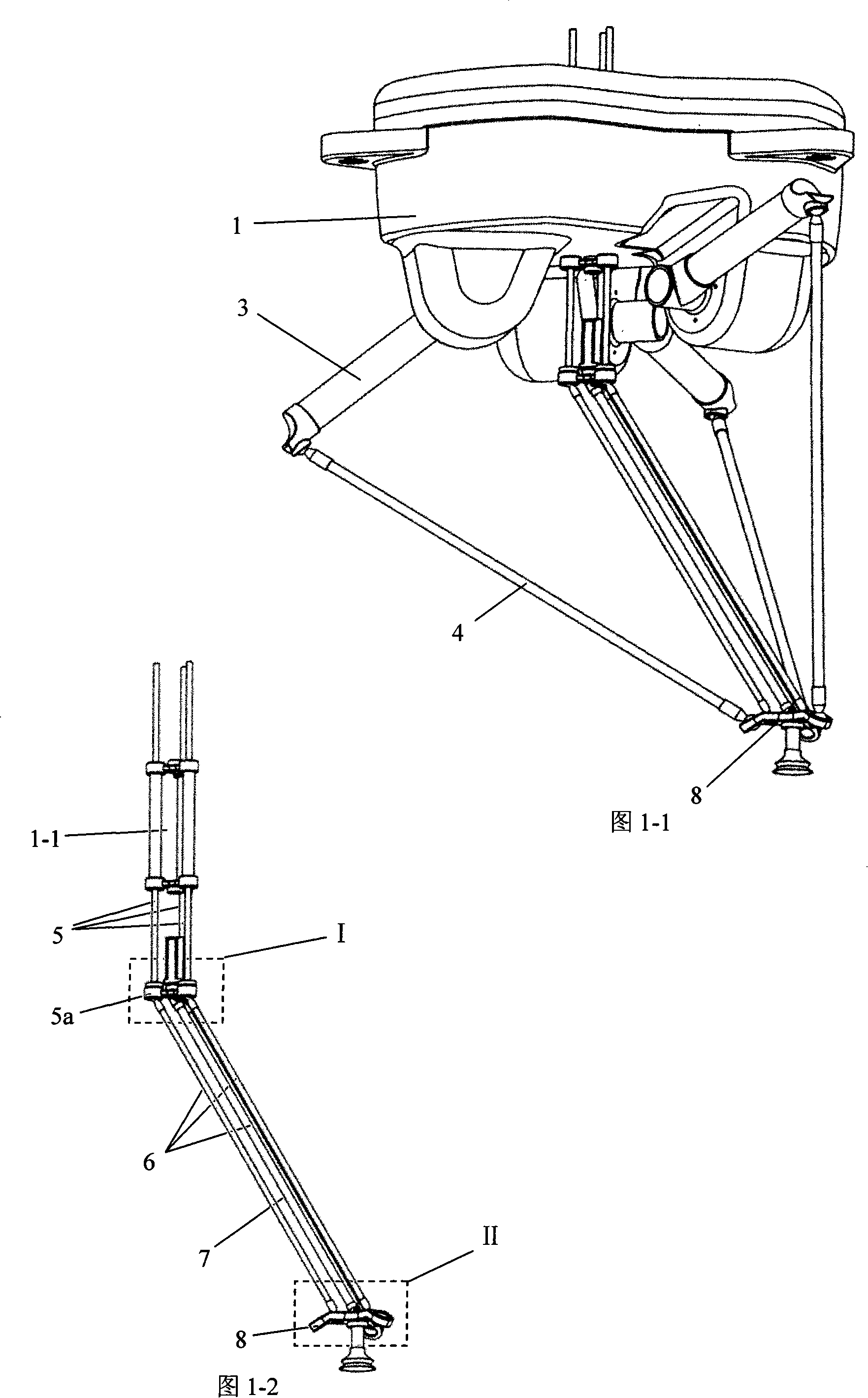
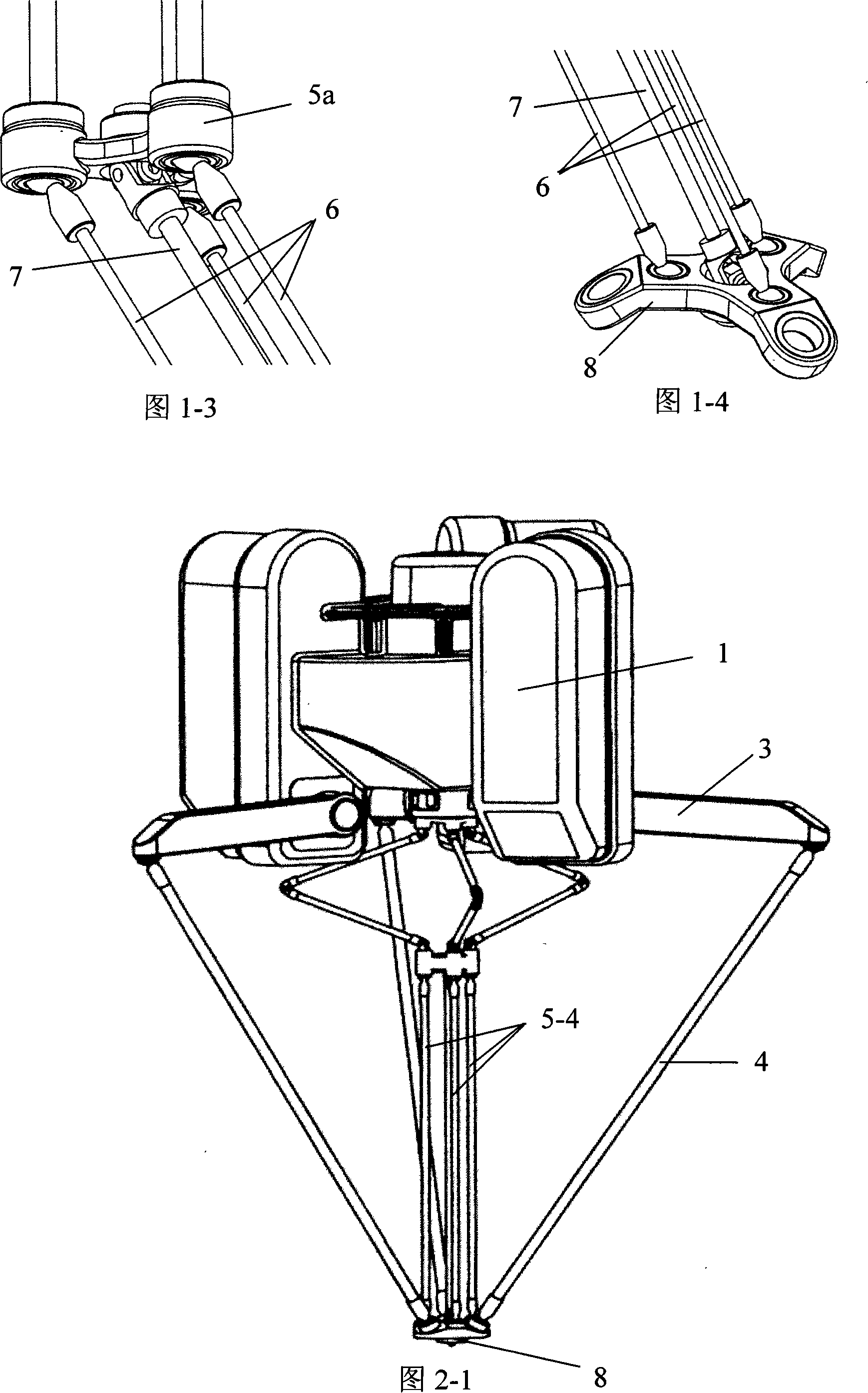
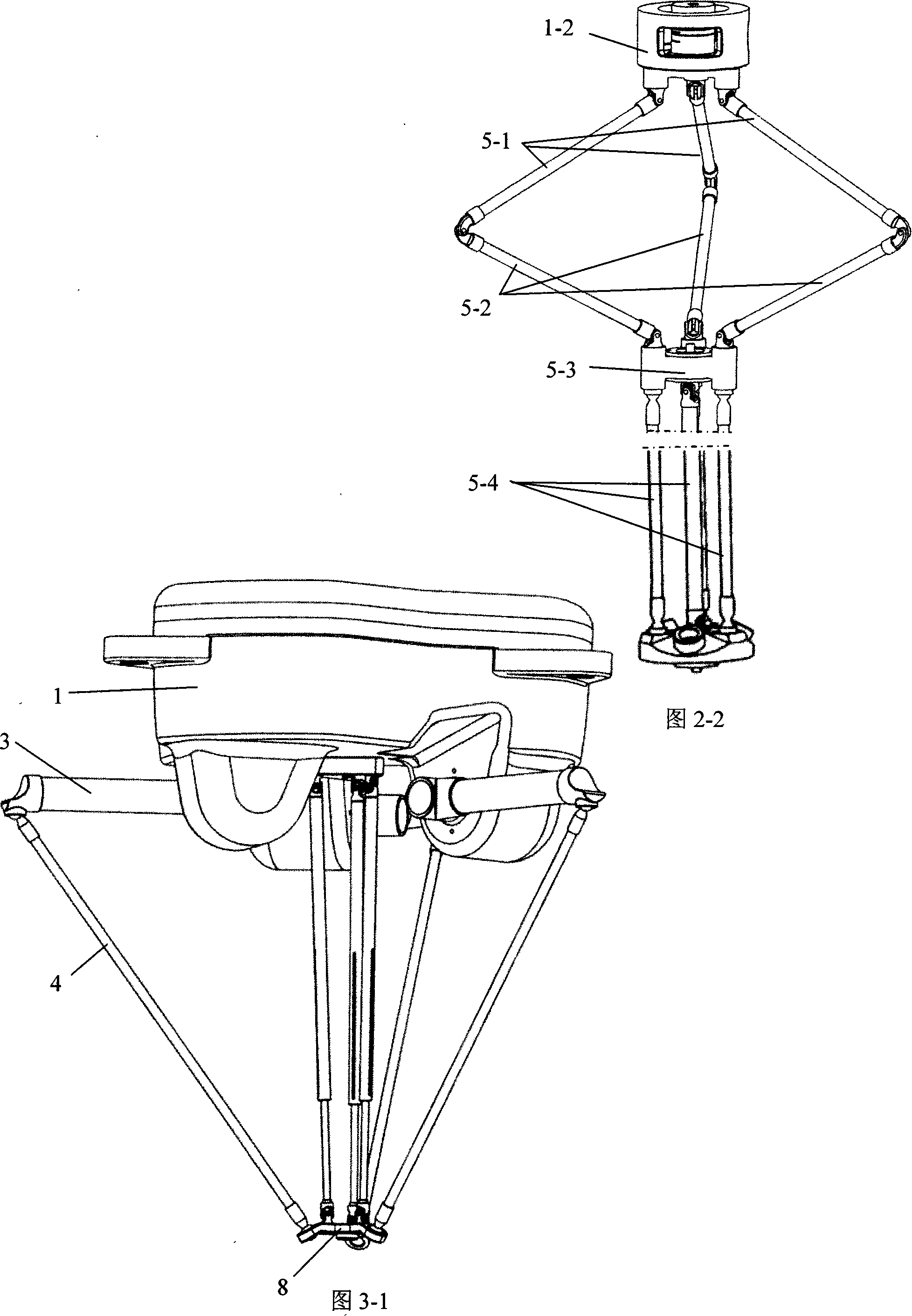
[0027] As shown in Fig. 1-1, Fig. 2-1, and Fig. 3-1, a space three-translation parallel mechanism with a single rod on a remote frame consists of a fixed frame 1 and a moving platform 8, which are arranged between the fixed frame 1 and the Three active branch chains with the same structure between the moving platform 8 and a driven branch chain connecting the fixed frame 1 and the moving platform 8 are composed of the driven branch chain between the fixed frame and the moving platform, which can limit the movement of the moving platform. 8 three rotational degrees of freedom.
[0028] Please refer to Fig. 4, the three active branch chains are respectively composed of the driving device 2, the near frame bar 3 and the far frame bar 4; one of the three active branch chains is connected with the fixed frame 1 and the moving platform 8 The way is: as shown in Figure 4, the dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More