

Concurrent parallelogram-containing three-translational freedom robot mechanism
A parallelogram and tri-translation technology, applied in the field of robotics, can solve problems such as difficulty in ensuring the attitude accuracy of the moving platform and changes in the attitude of the moving platform, and achieve the effect of avoiding attitude errors and ensuring attitude accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing:
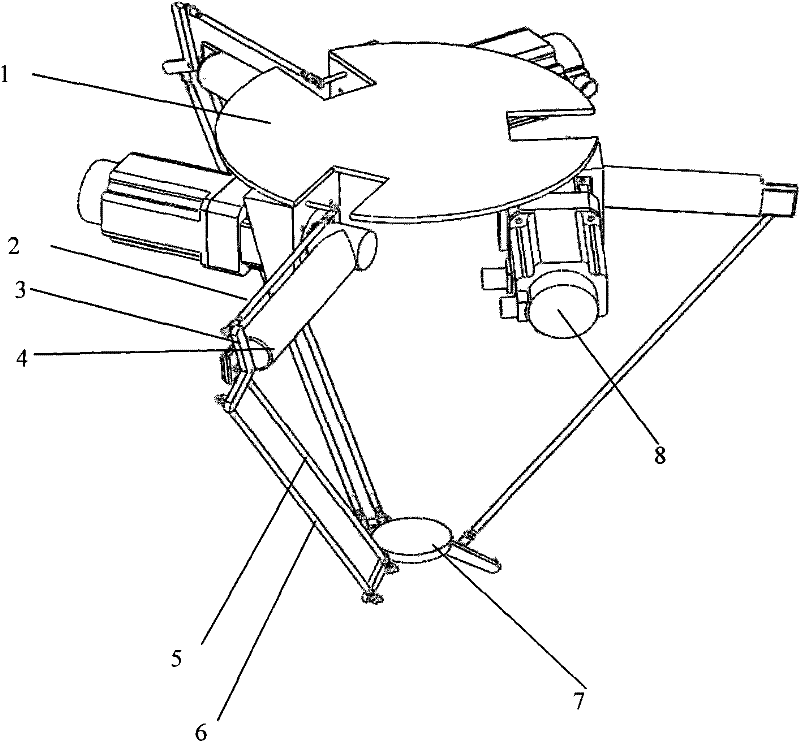
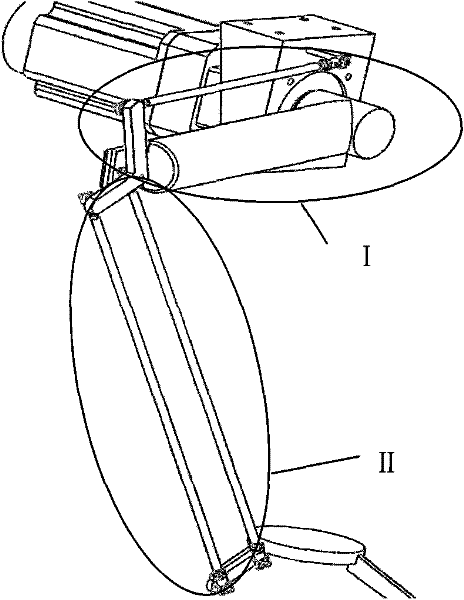
[0015] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 As shown, a space three-translational-moving parallel mechanism with converging parallelograms consists of a static platform 1, a moving platform 7, three main branch chains with the same structure and two An auxiliary branch chain connects the static platform 1 and the dynamic platform 7, and the main branch chain and the auxiliary branch chain form two converging parallelogram branch chains, which can limit three degrees of freedom of rotation of the dynamic platform 7.
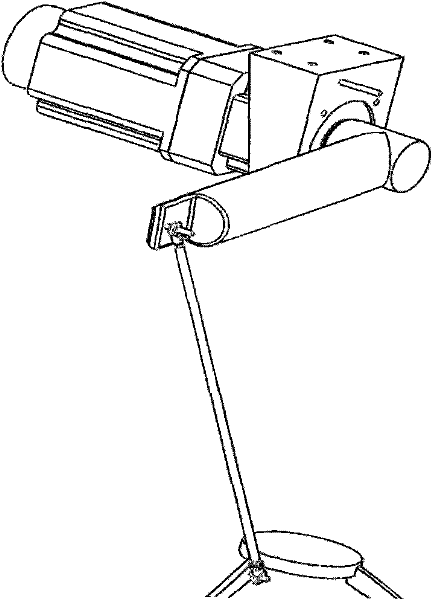
[0016] See figure 2 , the three main branch chains are respectively composed of the driving device 8, the active arm 4 and the driven arm 5; the connection mode between one of the three active branch chains and the static platform 1 and the moving platform 7 is as follows: figure 1 As shown, the driving device 8 is fixedly conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More