

Master-slave branch chain separate type two-translational motion parallel robot
A robot and two-translation technology, applied in the field of robotics, can solve the problems of limiting the acceleration of the end effector, reducing the range of the working space of the mechanism, and difficult to guarantee the accuracy of position and attitude, and achieve the effect of small inertia, simple structure and high acceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
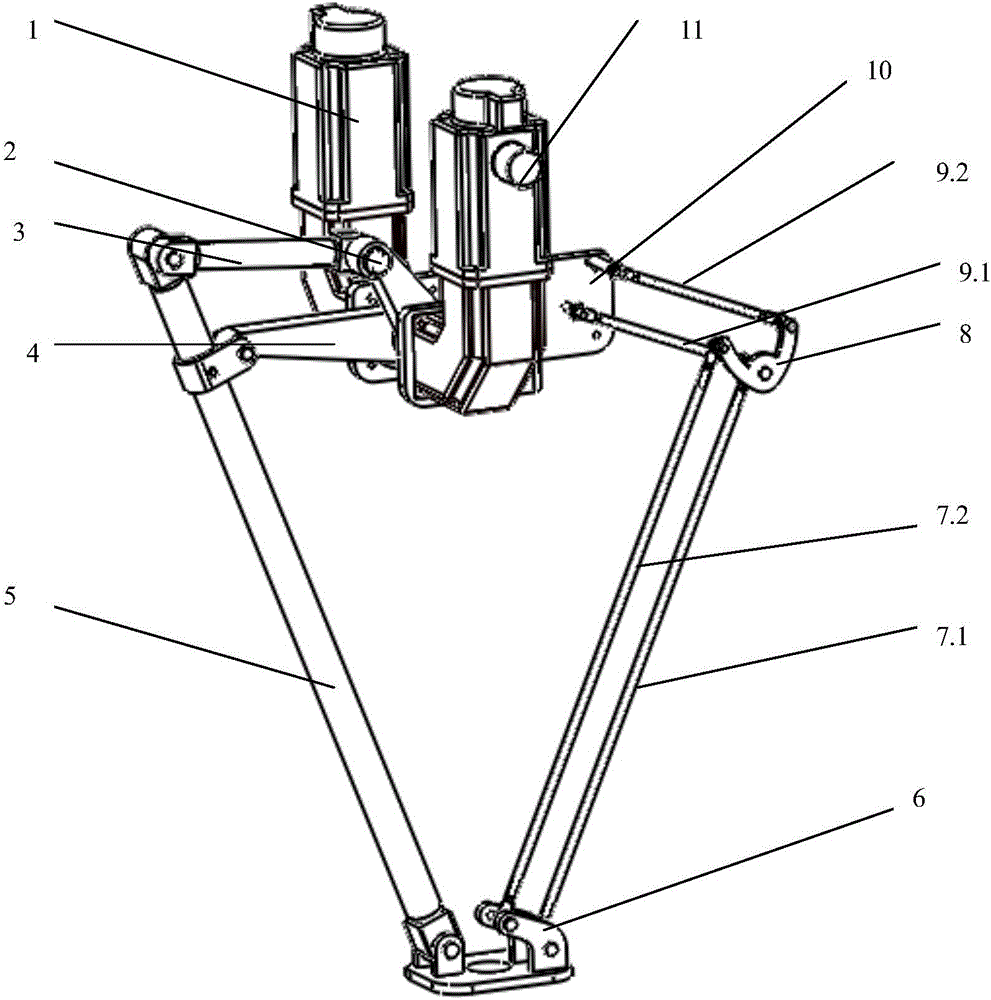
[0019] A two-degree-of-freedom parallel robot with master-slave branch chain separation provided by the present invention includes a frame 10 , a driving device, a motion branch chain and a moving platform 6 . The moving platform 6 forms a closed-loop parallel structure with the frame 9 through the kinematic branch chain; the kinematic branch chain includes a driving branch chain and a driven branch chain; The moving platform 6 is connected; the active branch chain drives the end effector to move in translation, and the driven branch chain and the active branch chain restrict three rotational degrees of freedom and one translational degree of freedom of the end effector.
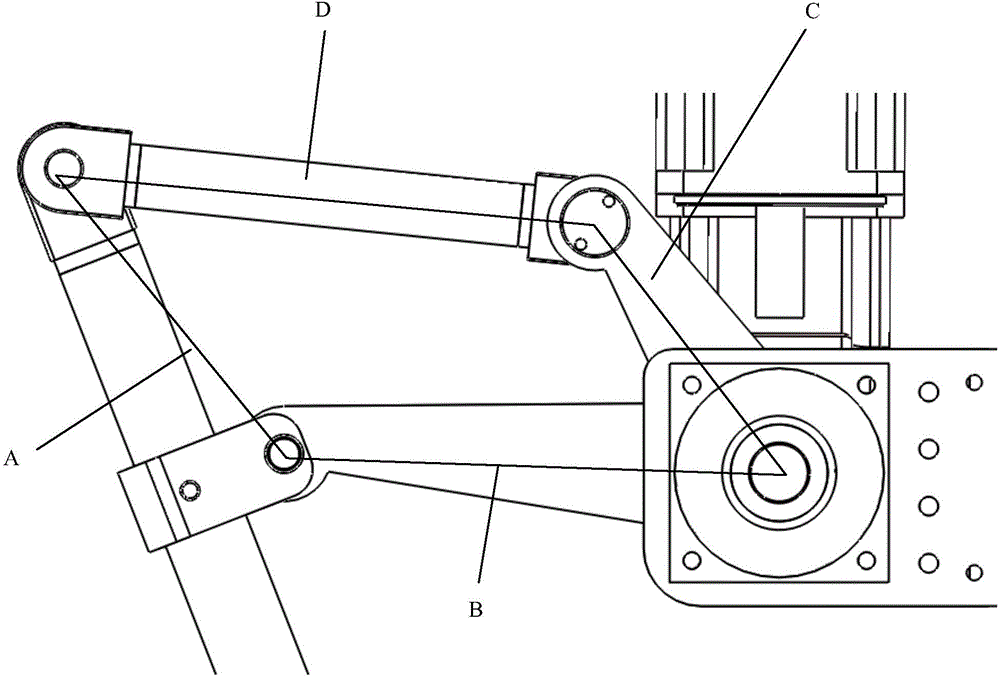
[0020] The active branch chain is composed of the first drive device 1, the second drive device 11, the first active arm 4, the second active arm 2, the linkage arm 3 and the driven arm 5; the rod of the first active arm 4 long (see image 3 The straight line segment B) in is equal to the bar length of link...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More