

A three-degree-of-freedom robot for batch flipping of wine bottles
A robot and degree of freedom technology, applied in the direction of conveyors, manipulators, conveyor objects, etc., can solve the problems of insufficient precision structure, expensive equipment, high price, etc., and achieve the effect of ensuring position accuracy, position accuracy, and stable posture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings.
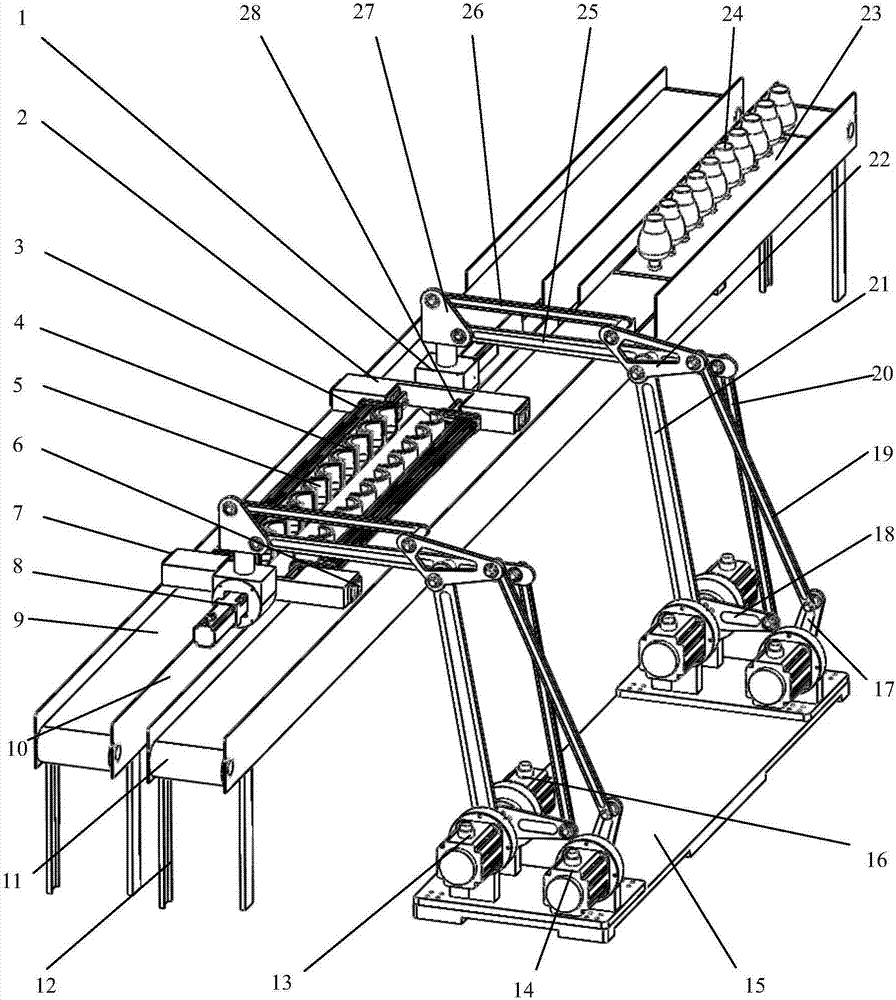
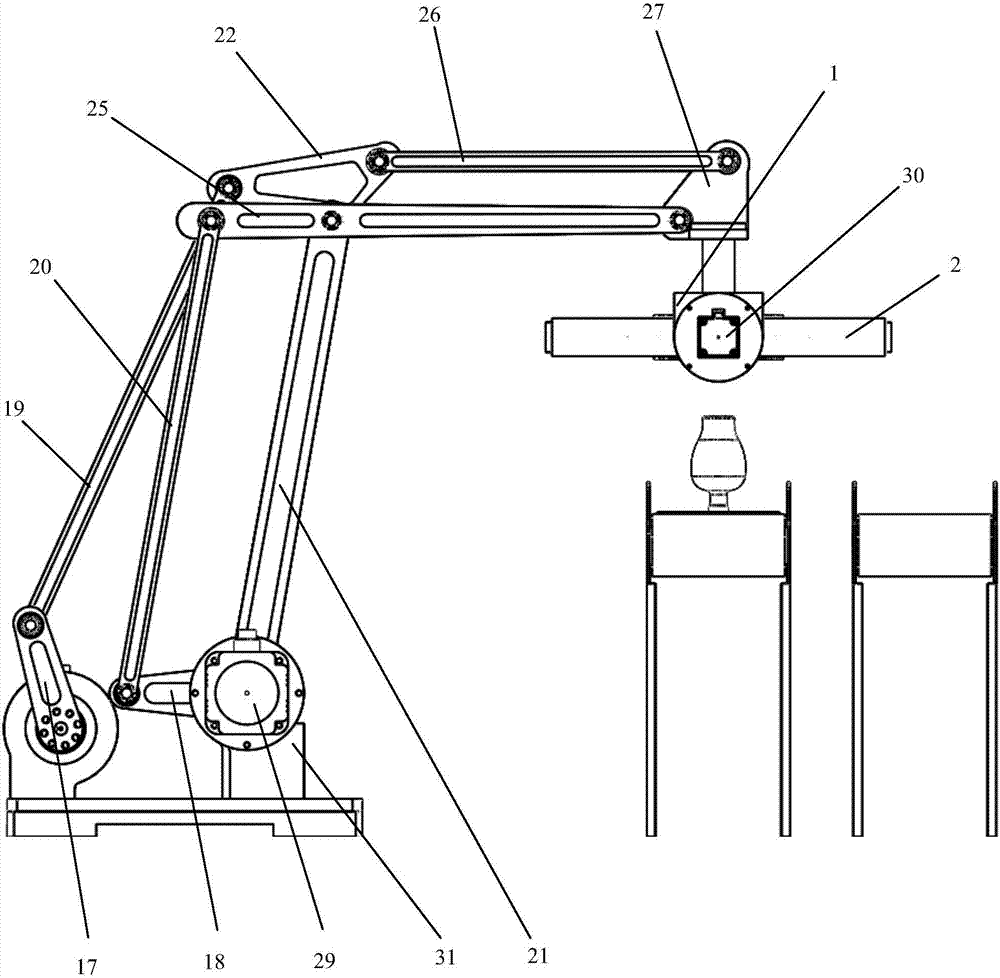
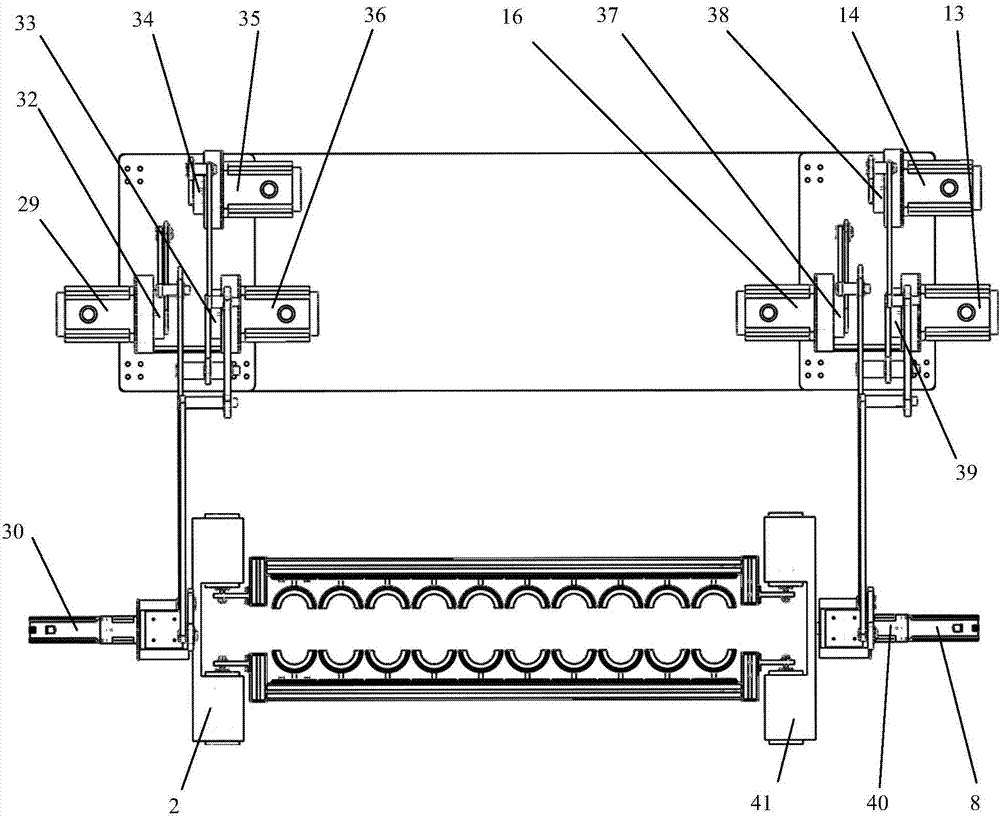
[0029] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, a three-degree-of-freedom robot for batch turning of wine bottles provided by the present invention includes a fixed frame 15, a turning device, two sets of identical driving branch chains and conveyor belt devices. The two sets of driving branch chains work together to provide two degrees of translational freedom for the turning device.
[0030] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, the drive branch chains are connected to each other through a rotating hinge and a rotating pair formed between the bearing and the shaft.
[0031] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 As shown, the drive branch chain includes a fixed frame 15, a nodding flange 17, an attitude maintaining bar 19, a small arm 18, a small arm pull bar 20, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More