

Virtual flexible body deformation operation simulation system supporting haptic feedback
A simulation system and tactile feedback technology, which is applied in the field of virtual flexible body surgery simulation system, can solve the problems of unreliability, high difficulty of vascular distribution structure surgery, and inability to feel force tactile feedback in advance, so as to achieve stable force tactile feeling and realistic simulation effect , the effect of meeting the requirements of fine work and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
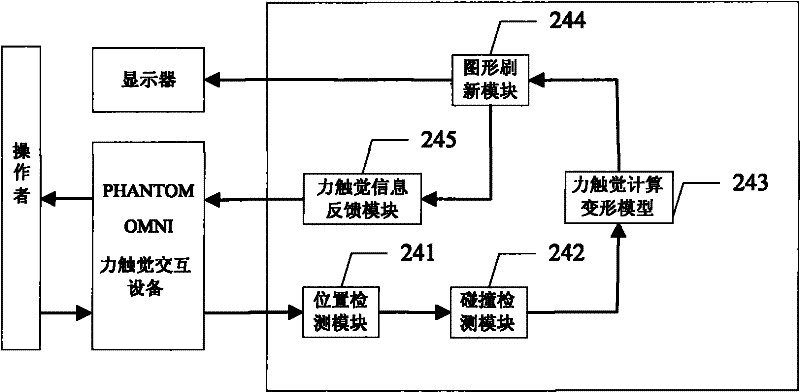
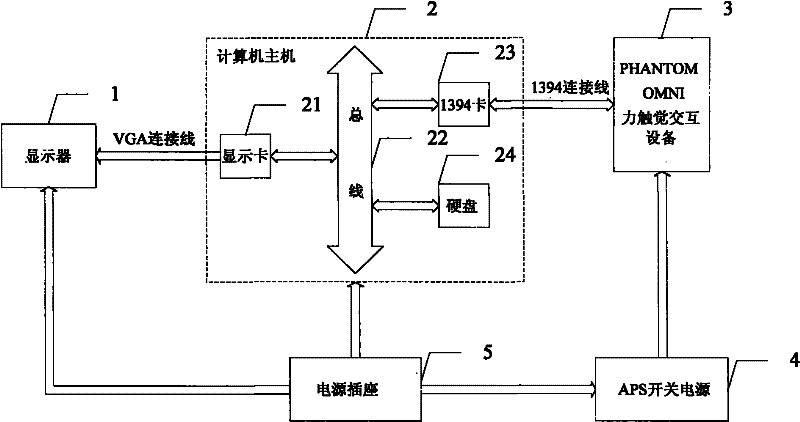
[0051] A haptic feedback simulation system for a virtual flexible body, comprising: a host computer 2 and a haptic interaction device 3, a display 1 is connected to the host computer 2, and the host computer 2 includes at least a hard disk 24 and a 1394 card 23, its features That is, the hard disk 24 includes at least: a position detection module 241 for detecting the position of the virtual agent, a collision detection module 242 for detecting whether the virtual agent collides with the virtual flexible body, a force-tactile calculation deformation module 243, and a force-tactile calculation deformation module 243. The graphics refresh module 244 and the force-tactile information feedback module 245 of the latest force-tactile deformation information sent by the deformation module 243 refresh the graphics. The deformation information of the flexible body surface generated by the tactile calculation deformation module 243 is transmitted to the haptic interaction device 3,
[0...
Embodiment 2
[0084] A haptic feedback simulation system for a virtual flexible body, comprising: a host computer 2 and a haptic interaction device 3, a display 1 is connected to the host computer 2, and the host computer 2 includes at least a hard disk 24 and a 1394 card 23, its features That is, the hard disk 24 includes at least: a position detection module 241 for detecting the position of the virtual agent, a collision detection module 242 for detecting whether the virtual agent collides with the virtual flexible body, a force-tactile calculation deformation module 243, and a force-tactile calculation deformation module 243. The graphics refresh module 244 and the force-tactile information feedback module 245 of the latest force-tactile deformation information sent by the deformation module 243 refresh the graphics. The deformation information of the flexible body surface generated by the tactile calculation deformation module 243 is transmitted to the haptic interaction device 3,
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More