

Unmanned helicopter independent landing method based on natural landmark and vision navigation
An unmanned helicopter and autonomous landing technology, which is applied to the integrated navigator, target-seeking control, non-electric variable control, etc., can solve the problems of reducing the maneuverability of the unmanned helicopter and consuming manpower, and achieves an increase in take-off weight and a simple structure. , indicating precise effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
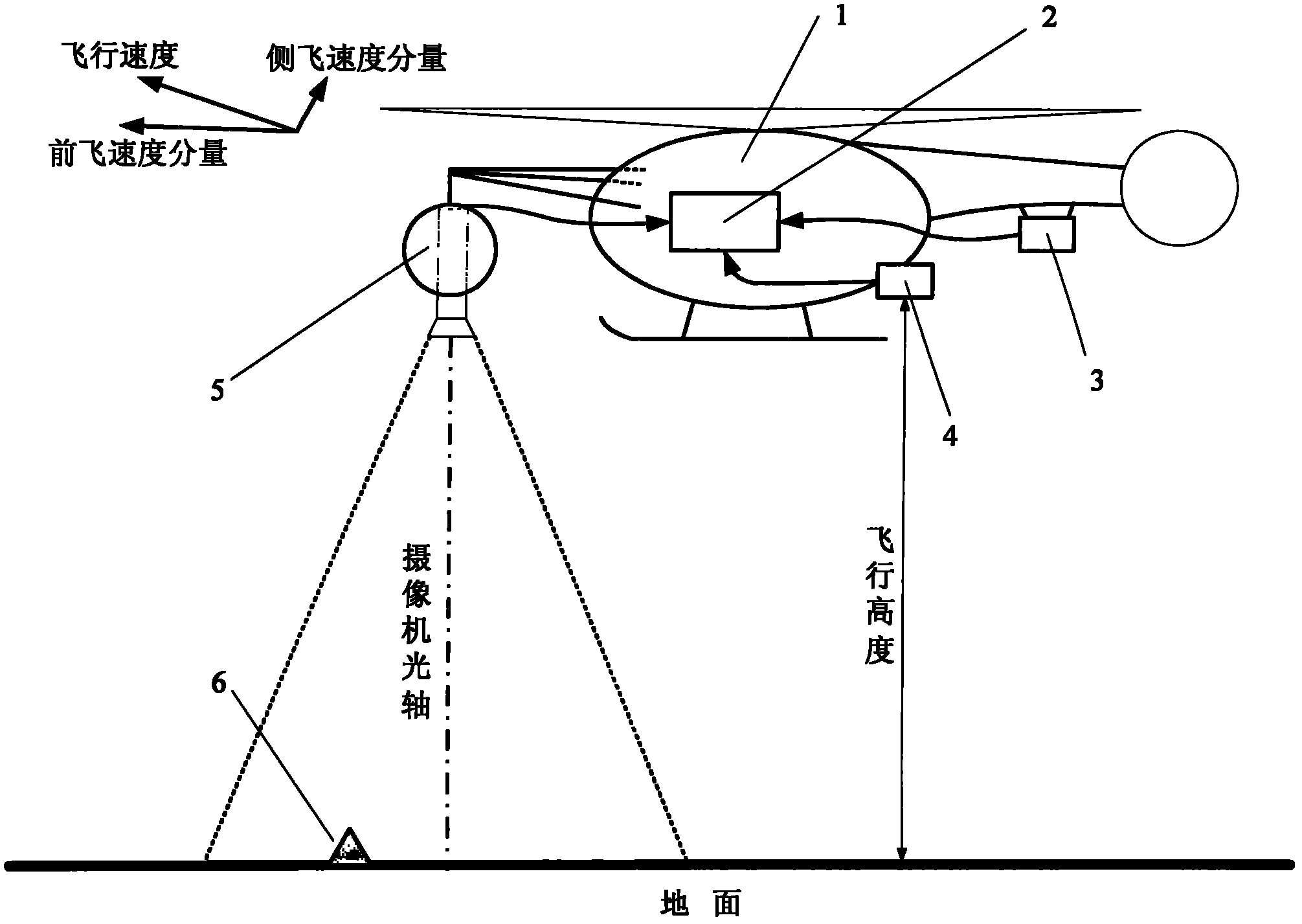
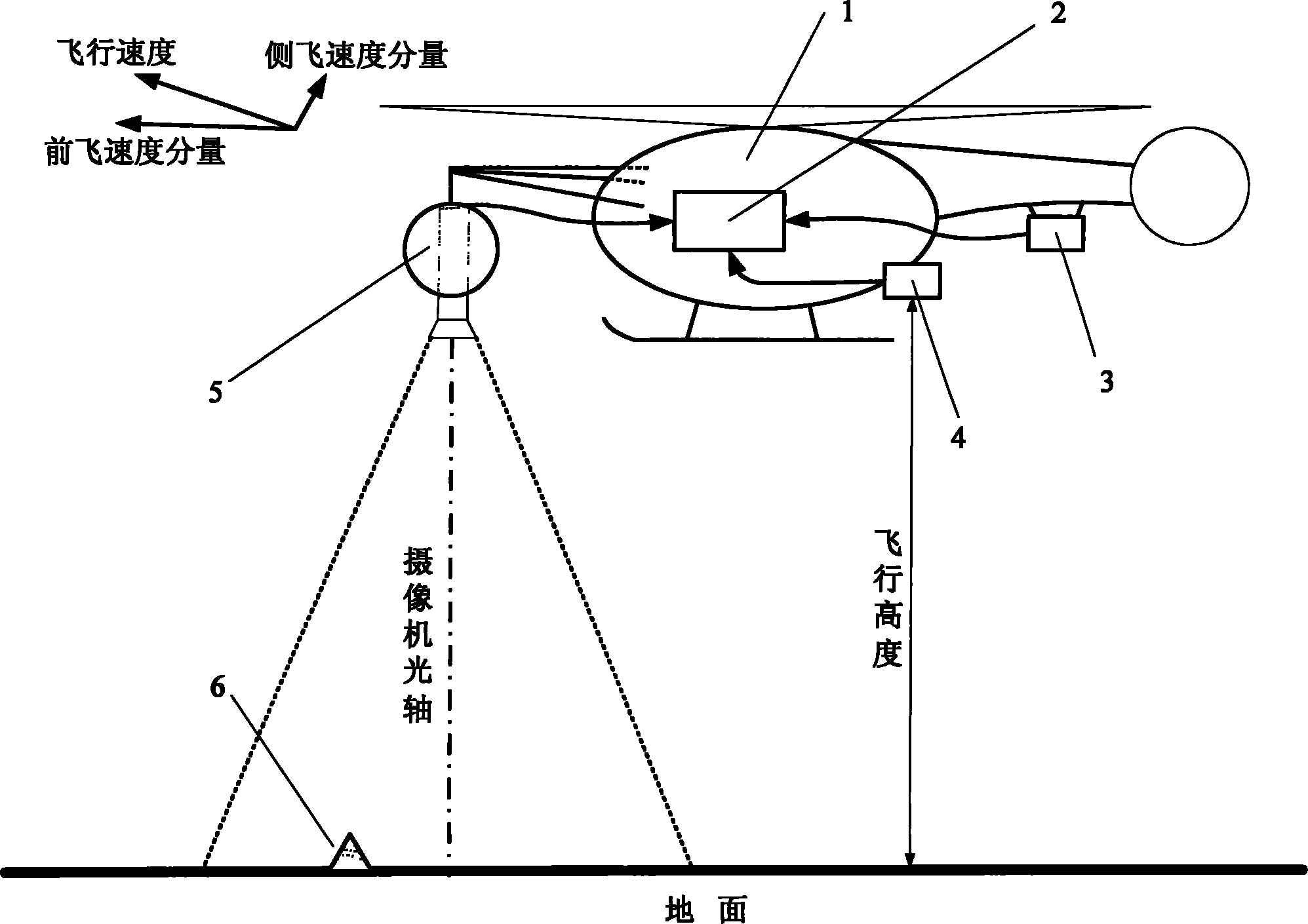
[0015] The autonomous landing method of an unmanned helicopter based on natural landmarks and visual navigation is mainly composed of an unmanned helicopter (1), a flight control computer (2), a magnetic heading sensor (3), an altimeter (4) and an onboard camera (5).
[0016] During the autonomous landing process of the unmanned helicopter (1), the flight control computer (2) controls and keeps the heading of the helicopter constant by reading the data of the magnetic heading sensor (3) in real time.
[0017] Simultaneously, the airborne camera (5) continuously captures ground images, and transmits the images to the flight control computer (1) in real time. The flight control computer (1) searches the image for a ground natural landmark with obvious features, and detects the moving speed of the natural landmark in the image. Since the natural landmarks on the ground and the helicopter are in relative motion, the horizontal movement speed of the helicopter relative to the groun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More