

Nuclear magnetism compatibility surgical robot based on screw drive
A surgical robot and wire transmission technology, applied in surgery, medical science, diagnosis, etc., can solve the problems of inability to meet the power requirements of the robot, low torque of the nuclear magnetic compatibility motor, and hysteresis of the pneumatic drive, so as to expand the optional range of the drive and improve the Good precision and linearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
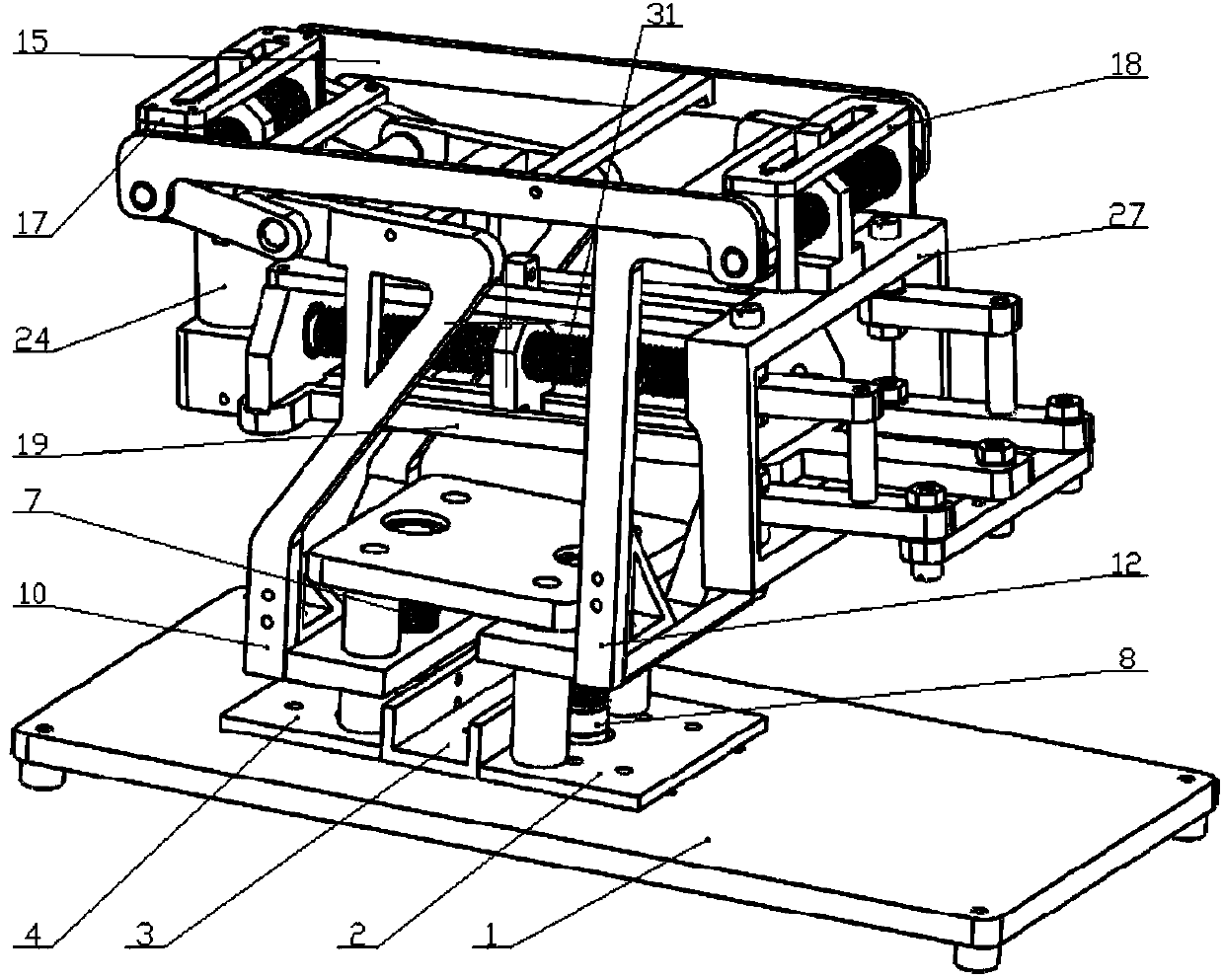
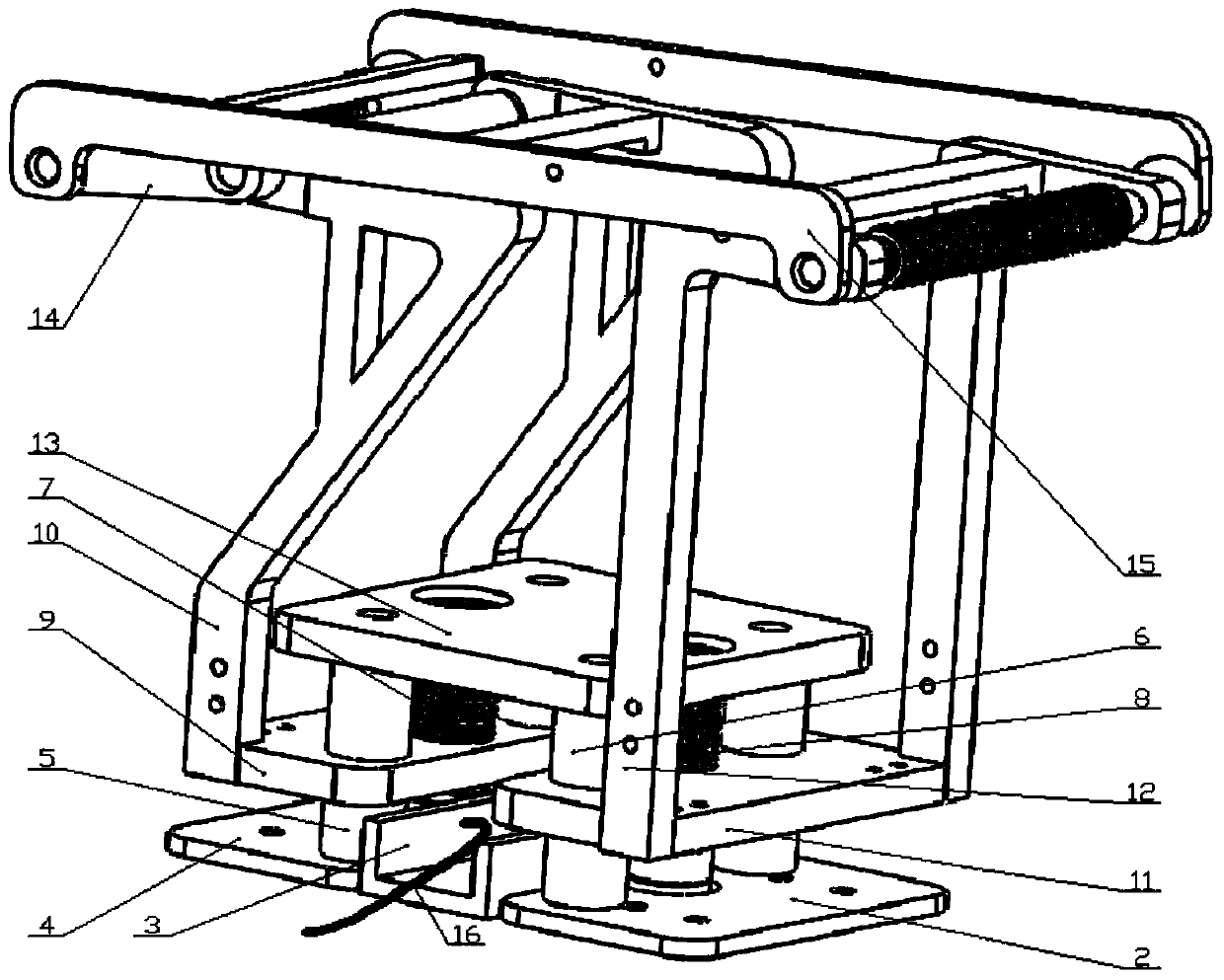
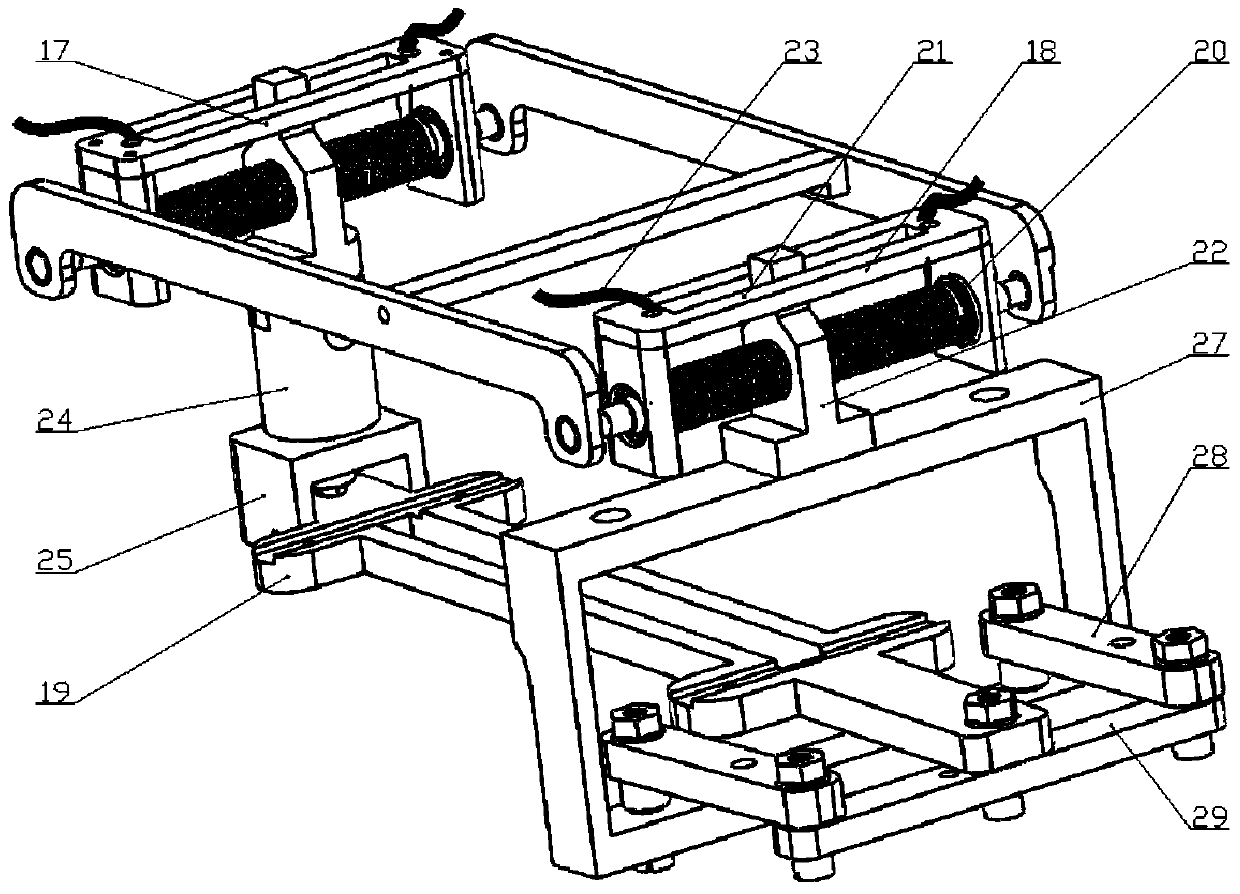
[0019] see Figure 1 to Figure 5 , an NMR compatible surgical robot based on wire transmission, comprising a base 1, a lifting part, a deflection part and an acupuncture part; the acupuncture part is mounted on the deflection part, and the deflection part is mounted on the lifting part , the lifting part is installed on the base; the acupuncture part, the deflection part and the lifting part all adopt a wire transmission structure.
[0020] In this embodiment, the above-mentioned lifting part is a left-right symmetrical structure, which includes a left-right symmetrical front sliding bottom plate 9, a rear sliding bottom plate 11, a front fixed bottom plate 4, and a rear fixed bottom plate 2, and the left side structure of the lifting part in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More